誤碼儀是常用的測試高速數字(包括光通信)器件和系統的儀器。
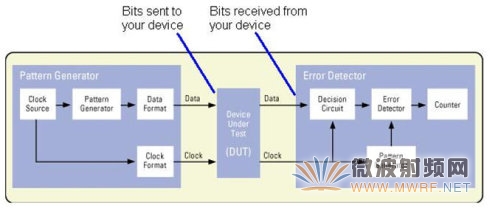
圖1 傳統誤碼儀結構框圖
傳統誤碼儀由2大部分組成:
1)碼型發生器。
包括:時鐘源(可以采用內時鐘或外時鐘),碼型產生組件(產生需要的碼型格式:PRBS或自定義等格式),信號調理前端(輸出電平控制等),時鐘信號前端(輸出時鐘電平控制等)。
2)誤碼接收機:
包括:時鐘恢復電路(有的BERT沒有CDR),碼型判決電路(從信號中判斷出碼型數據),錯誤碼型檢測電路(判斷碼型數據是否正確),欲接收碼型產生電路(產生豫接收的碼型,作為參考),錯誤計數器等。
為了對數字系統進行誤碼率測量,一般用測試碼型激勵輸入端。通常,測試碼型采用偽隨機二進制序列(PRBS),當然也可用其他帶協議的激勵模式(用戶自定義模式)來考察性能極限。
對于遠程通信或數據通信傳輸系統,目的是仿真在正常工作條件下所經歷的隨機通信量。采用真正隨機信號的問題是,誤碼檢測器沒有了解被傳輸的實際位置的手段,因而沒有檢測誤碼的途徑。代之采用偽隨機信號,則意味著它具有真實隨機信號的幾何所有統計特性,看起來似乎就是被測項目,而實際上是完全確定的,因而可有誤碼檢測器所預測。為此,已對最大長度PRBS碼型的范圍作出了規定。在誤碼檢測器處,被測系統的輸出與本地產生的無誤碼參考碼型逐位進行比較,計算出誤碼率。
任何被傳輸位的出錯概率既有統計性質且必須如此處理:對在給定時段內的出錯概率進行測量的任何作法可以用不同方式表示。最常用的表示方式為:
誤碼率(BER)=在平均間隔內計讀的出錯位數/在平均間隔內被傳輸的總位數

圖2 將碼型發生器與被測系統的輸入端相連,在輸出端連接誤碼檢測器
顯然,結果具有長期平均誤碼率的統計特性,而誤碼率與總體中取出的樣本量有關。有三種計算BER的方法被普遍使用。
第一種方法(常用在早期測試裝置中)只對時鐘周期技術,以提供時基或平均間隔。這很容易利用分立的邏輯十進制分頻器來實現。由于目前可以利用微處理器,故已使用更方便的選通周期。
第二種方法,采用譬如說1秒鐘、1分鐘或1小時的定時選通周期,并有累積總數計算誤碼率。這種方法的優點在于,它提供了與后面討論的誤碼性能判據一致的結果。
第三種方法,通過對足夠多(通常為100或更多)的誤碼計數來確定選通周期,以便獲得可靠的統計結果。同樣,處理器也根據累積的總數來計算誤碼率。不過,在誤碼率之值很小的情況下,此法可能導致很長的選通周期。例如,一個以100Mbps運行的系統,當誤碼率在10^-12時,為累積100次誤碼需要將近12天的時間。
最常用的方法是選取固定的重復的重復周期后計算誤碼率的方法2。在這種情況下,結果中的方差將連續改變。因此,通常的做法是,若方差超出一般能接受的水平,便給出某類警告。最廣泛的接受水平為10%,即誤碼計數至少為100次誤碼。在實際的數字傳輸系統,特別是利用無線傳播的數字傳輸系統中,誤碼率可能顯著地隨時間變化。在這種情況下,長期平均值值提供部分情況。通信工程師還關心被測系統性能下降到不能接受時所占的時間百分數。這稱為“誤碼分析”或“誤碼性能”。
測試碼型通常要在通信量仿真的PRBS與考察模式相關趨勢或臨界點時系統效應的特殊模式之間進行選擇。利用PRBS時,選擇二進制序列以及所形成的頻譜特性和運行特性是重要的。這些特性可以歸納為:
1)序列長度(位);
2)決定二進制運行特性的移位寄存器的反饋配置;
3)取決于位速率的頻譜譜線間隔。
PRBS碼型已由CCITT針對數字傳輸系統的測試進行了標準化(建議0.151,0.152和0.153)。通常,工作速率越高,仿真實際數據通信量所需的序列越長。對于處于Gbit/s范圍的測試,目前測試設備能提供2^n-1序列長度。
現代的抖動誤碼儀在傳統的誤碼儀的基礎之上增加了抖動產生能力,能夠方便的進行接收靈敏度的測試。圖2是由傳統誤碼儀演進過來的抖動誤碼儀,它是把多種儀器集中在一起,并經過校準設計已達到產生較精確的抖動信號的目的。

圖3 現代的抖動誤碼儀的演進
從圖中可以看出:SJ和SSC由IQ調制器產生;PJ和BUJ由500ps或200ps可控延遲線產生;RJ由200ps可控延遲線產生。圖5是ISI抖動和正弦波干擾的產生電路,由單獨一塊可切換長度的傳輸線組成。
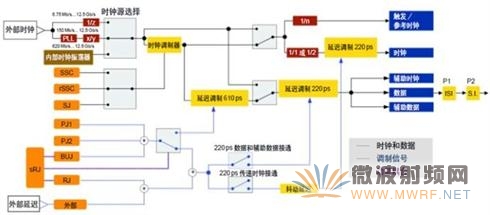
圖4 抖動誤碼儀結構框圖
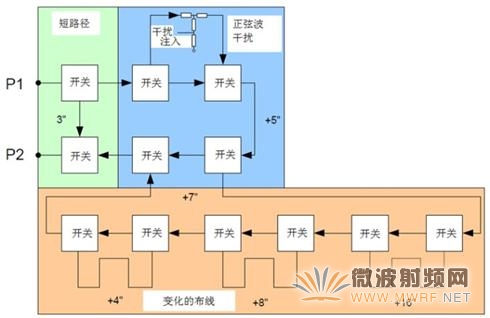
圖5 ISI抖動和正弦波干擾產生原理框圖
抖動誤碼儀用于抖動容限測試:
為了測試抖動容限,需要儀器有產生抖動的能力,經校準的、集成的抖動產生能力一般要求為:
1.周期抖動,單音和雙音
2.正弦抖動
3.隨機抖動和在頻譜上分布的隨機抖動
4.有界不相關抖動
5.碼間干擾(ISI)
6.正弦干擾
7.SSC 和剩余SSC
8.外部抖動注入:將外部信號源連接到延遲控制輸入端。
使用者在儀器屏幕上可以輕松設置抖動類型和抖動幅度的組合,因此,可以設置用于接收機測試的眼圖閉合超過50% 的經校準的“壓力眼圖”。可以通過干擾通道注入額外抖動。它可增加ISI和差分/單端正弦干擾。
自動抖動容限表征測試要根據要求選擇起始/終止頻率、步進、精度、BER水平、置信度對SJ 在頻率上進行自動掃描。一般綠點表示接收機可以容忍的注入的抖動的位置。紅點表示超過BER設置門限的位置。通過選擇測試點,抖動設置條件可以被恢復用于進行更多的其它分析。這個一致性曲線可以顯示在測試結果的屏幕上,以便用戶立即判讀結果。該自動表征功能可以極大地節省編程時間。
而自動抖動容限一致性測試可自動測試被測件與標準或用戶規定的接收機抖動容限曲線限制的符合性。許多常用的串行總線標準都定義了抖動容限曲線,如:SATA、光纖通道、FB-DIMM、10GbE/XAUI、CEI 6/11G和XFP/XFI。合格/ 不合格結果顯示在圖形結果屏幕上,并可以保存和打印。還要求可生成全面的一致性報告(包括抖動設置和每個測試點的總抖動結果),并以html 文件格式生成簡單的抖動容限測試文檔并可進行保存。
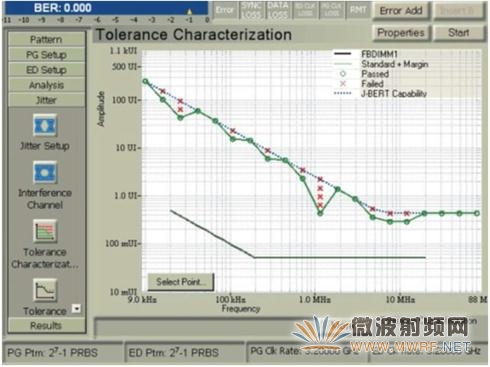
圖6 自動抖動容限表征。綠圓圈表示被測件滿足所要求的BER 的位置
 粵公網安備 44030902003195號
粵公網安備 44030902003195號