運(yùn)用NI USRP打造出經(jīng)濟(jì)實(shí)惠的8x8 MIMO測試臺
此技術(shù)文章說明了LabVIEW 與USRP 平臺的使用方式,進(jìn)而打造出相位同調(diào)(Phase Coherent) 的MIMO 測試臺,可以從2x2 擴(kuò)充為8x8 天線設(shè)定,并且用來測試多種MIMO 與多用戶的通信研究項(xiàng)目。
1. 8x8 MIMO 簡介
現(xiàn)在Single-Link 單連結(jié)MIMO (多重輸入與多重輸出) 通信的概念可說是非常普遍[1],新的無線標(biāo)準(zhǔn)也陸續(xù)采用此技術(shù)。 比如說LTE Advanced 標(biāo)準(zhǔn),其中結(jié)合了高達(dá)4x4 MIMO 上行與8x8 MIMO 下行[2]。 隨著各式標(biāo)準(zhǔn)持續(xù)提高數(shù)據(jù)傳輸率、用戶人數(shù)與穩(wěn)定的鏈接數(shù)量,工程師也必須開發(fā)新并仿真的算法,并且在實(shí)際情況下加以檢驗(yàn)。 而且各機(jī)構(gòu)也開始大量投資MIMO 應(yīng)用,包含多使用者的MIMO (MU-MIMO)、合作式MIMO 與協(xié)作多點(diǎn)(CoMP) 等項(xiàng)目。 研究基金的競爭狀況越來越激烈,同時(shí)因?yàn)樵椭谱鳑Q定了新算法的實(shí)用性,重要性更甚于仿真通道,因此讓整個(gè)情況更具挑戰(zhàn)性。 如要發(fā)表全新的研究結(jié)果,必須建置原型,而且研究結(jié)果還要具有充分的重復(fù)使用率。 可擴(kuò)充的現(xiàn)成軟件定義無線電(Software Defined Radio,SDR) 解決方案可在研究員制作算法原型時(shí)提供關(guān)鍵優(yōu)勢,因其兼具了開發(fā)客制化無線電的低成本彈性,以及高成本傳統(tǒng)儀器的可重復(fù)使用效能。

圖1. NI USRP-2920 設(shè)備
通用軟件無線電外圍設(shè)備(USRP,見圖1) 可說是最方便好用也最經(jīng)濟(jì)實(shí)惠的現(xiàn)成軟件定義無線電系統(tǒng),非常適合更高階次的MIMO 應(yīng)用。 此技術(shù)文章說明了LabVIEW (圖2) 與USRP 平臺的使用方式,進(jìn)而打造出相位同調(diào)(Phase Coherent) 的MIMO 測試臺,可以從2x2 擴(kuò)充為8x8 天線設(shè)定,并且用來測試多種MIMO 與多用戶的通信研究項(xiàng)目。
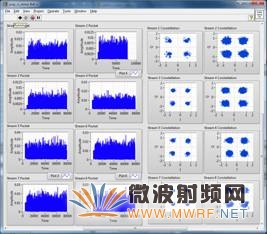
圖2. 8x8 MIMO LabVIEW 人機(jī)界面
2. USRP 硬件概述
USRP 平臺是一款RF 軟件設(shè)定的無線電收發(fā)器,可用于無線通信研究。 將USRP 連接至主計(jì)算機(jī)后,即可做為軟件定義的無線電,提供主機(jī)架構(gòu)的數(shù)字信號處理功能。 每個(gè)USRP 設(shè)備都會提供獨(dú)立的傳送與接收通道,可針對特定的硬件配置提供全雙工作業(yè)效能。
USRP 設(shè)備會通過GB ETHERNET 端口連接至主計(jì)算機(jī),此端口需要Standard 1 Gigabit Ethernet (GbE) 連接功能。 同時(shí)以6 伏特DC 運(yùn)作,最高耗電量為18 瓦特。 請參閱USRP 系統(tǒng)方塊圖(圖3),傳送與接收鏈分別獨(dú)立運(yùn)作,但會共享一個(gè)通用的內(nèi)接10-MHz TCXO 參考頻率,局部震蕩器(LO) 便是來自此頻率。
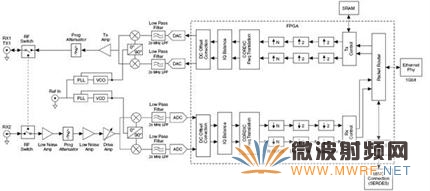
圖3. NI USRP-2920 系統(tǒng)方塊圖
Rx 信號路徑
就接收端而言(圖3 下方),所接收的模擬RF 信號會通過RX 1 或RX 2 接頭進(jìn)入,這會由可設(shè)定的切換開關(guān)來決定,并且經(jīng)過可調(diào)整的(0-30dB) 增益階段到達(dá)混合器,進(jìn)而將LO RF 頻率直接轉(zhuǎn)換為基帶IQ 組件。100MS/s、14 位的雙信道ADC 會過濾基帶I/Q 模擬信號并取得其樣本。 經(jīng)過數(shù)字化的I/Q 數(shù)據(jù)會經(jīng)過平行的內(nèi)建信號處理(OSP) 程序,此程序會套用DC 偏移修正作業(yè)、采用CORDIC 執(zhí)行數(shù)字降轉(zhuǎn)換以修正次要的頻率偏移并達(dá)到所需的RF 中央頻率,過濾并抽取100M S/sec 的輸入信號至用戶所指定的IQ 速率。 經(jīng)過降轉(zhuǎn)換的樣本接著會通過標(biāo)準(zhǔn)的GbE 連接功能傳送至主計(jì)算機(jī),如果是16 位模式的話基帶IQ 速率最高可達(dá)25 MS/s,如果是8 位模式的話則是50 MS/s。
Tx 信號路徑
就傳送端而言(圖3 上方),主計(jì)算機(jī)會合成基帶IQ 信號,接著通過GbE 連接功能把合成過的I/Q 信號樣本傳送至USRP,如果是16 位模式的話最高可達(dá)25 MS/s,如果是8 位模式的話則是50 MS/s。USRP 硬件OSP 會采用數(shù)字升轉(zhuǎn)換程序來插入合成信號并且升轉(zhuǎn)換至400MS/s,根據(jù)所需的RF 中央頻率套用CORDIC 以便修正次要的頻率偏移,接著通過16 位的雙信道DAC 將信號轉(zhuǎn)換為模擬信號。 再來會通過直接轉(zhuǎn)換架構(gòu)來過濾并調(diào)變此模擬信號以達(dá)到指定的RF 頻率,進(jìn)一步混合LO 與模擬基帶IQ 信號。 可調(diào)整的(0-30dB) 增益階段會放大信號,以便通過外接的TX 1 端口來傳送信號。
時(shí)序與頻率
有了MIMO 擴(kuò)充埠即可同步化2 個(gè)USRP 的時(shí)序與頻率,此外也可做為以太網(wǎng)絡(luò)開關(guān),一組USRP 就能夠共享單一GbE 連接。USRP 前端設(shè)備具有REF IN (10-MHz 參考頻率) 與PPS (每秒脈沖) SMA 連接,可提供外部頻率參考與時(shí)序的同步化功能,以便補(bǔ)足內(nèi)接的TCXO 以提高頻率準(zhǔn)確度,也可針對大量設(shè)備提供同步化功能。
NI-USRP 驅(qū)動程序
至于軟件方面,LabVIEW 開發(fā)系統(tǒng)提供方便的強(qiáng)大接口,可搭配USRP 硬件,以便快速制作通信算法原型。NI-USRP 軟件驅(qū)動程序提供直覺性的函式、VI (LabVIEW 虛擬儀器,可直接對應(yīng)至硬件配置以便設(shè)定時(shí)序與同步狀態(tài))、開啟/關(guān)閉階段,還能執(zhí)行讀寫作業(yè)。 通過簡易的Rx 作業(yè)即可從LabVIEW 程序方塊圖呼叫驅(qū)動函式(圖4)。 第一個(gè)Tx 或Rx 應(yīng)用一定會包含下列6 個(gè)參數(shù):
Device Names:受控USRP 的專屬IP 地址。 新的USRP 硬件默認(rèn)的IP 地址是192.168.10.2
IQ Rate:基帶IQ 波形的取樣率決定了擷取或合成作業(yè)的實(shí)時(shí)帶寬
Carrier Frequency:重點(diǎn)頻譜的中點(diǎn)。 轉(zhuǎn)換至基帶IQ 后載波頻率就會成為中心或DC 組件
Gain:套用至模擬RF 信號的可調(diào)整增益(通常為0 ~ 30dB)
Active Antenna:切換設(shè)定,可決定以RX 或TX SMA 埠來進(jìn)行擷取或傳輸作業(yè)
Number of Samples:每次驅(qū)動程序呼叫元從設(shè)備擷取或傳送到Fetch Rx 或Write Tx VI 的取樣數(shù)量

圖4. 使用NI-USRP 驅(qū)動程序的LabVIEW 程序方塊圖
3. 可擴(kuò)充的8x8 MIMO 硬件系統(tǒng)架構(gòu)
多個(gè)USRP 設(shè)備可整合為單一個(gè)相位同調(diào)天線數(shù)組,以便傳送/接收信號。 本文所探討的MIMO 測試臺可從2x2 擴(kuò)充為8x8 天線設(shè)定(最多有8 個(gè)傳輸器和8 個(gè)接收器)。 建置測試臺時(shí)必須考慮到的硬件組件與優(yōu)缺點(diǎn),包含了頻率與時(shí)序同步,以及數(shù)據(jù)總線帶寬。
頻率與時(shí)序同步化
就標(biāo)準(zhǔn)的MIMO 通信測試臺而言,所有的Rx 或Tx 通道必須做為單一接收器或傳輸器運(yùn)作,同時(shí)搭配頻率與時(shí)序同步化功能以及一個(gè)相位同調(diào)的局部震蕩器(LO)。8x8 MIMO 測試臺的8 個(gè)USRP 設(shè)備都會采用相同的10MHz 參考頻率與PPS 時(shí)序基礎(chǔ),借此達(dá)到同步化效能。 根據(jù)8x8 MIMO 系統(tǒng)方塊圖(圖5),4 個(gè)USRP 設(shè)備會直接連接至每個(gè)參考信號,接著另外4 個(gè)USRP 設(shè)備會通過MIMO Data 與Synchronization 接線共享此信號。 這樣一來即可同步化所有8 個(gè)USRP 設(shè)備的頻率與時(shí)序,同時(shí)單一10-MHz 參考頻率還會衍生出相位同調(diào)的LO。 用來產(chǎn)生頻率的硬件則是OCXO (Oven Controlled Oscillator 恒溫震蕩器),此硬件采用Trimble 公司的Thunderbolt® GPS 授時(shí)頻率,可提供10 MHz 的參考頻率輸出與數(shù)字PPS 輸出[4]。OCXO 的頻率來源非常準(zhǔn)確,不必安裝GPS 天線即可運(yùn)作。 安裝GPS 天線則可以改善GPS 授時(shí)的同步化效能,提供一致的時(shí)序概念。
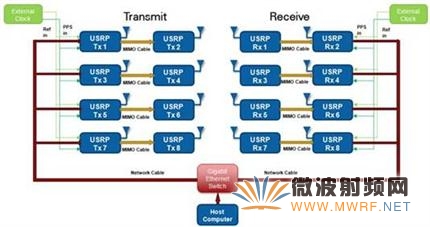
圖5. 8x8 MIMO 系統(tǒng)方塊圖
此外10 MHz 與PPS 參考信號的功率準(zhǔn)位也是相當(dāng)重要的考慮,因?yàn)轭l率信號會分配至所有的無線電。 在此應(yīng)用中,通用的同軸BNC「T」連接會劃分信號兩次,以便同步化前4 個(gè)USRP 設(shè)備。Tunderbolt 可提供大約7dBm 的10MHz 參考,以及2.4 V 的數(shù)字PPS 信號。 二度劃分信號(也就是以傘狀分散至4 個(gè)設(shè)備) 就會變成1dBm 與0.6V 參考,接近推薦的USRP Ref In 與PPS 輸入準(zhǔn)位(0dBm 與3.3V LVTTL 相容)。 如果必須進(jìn)一步劃分參考信號以確保適當(dāng)?shù)耐交埽琋I 建議將10MHz 與PPS 信號放大至建議的功率準(zhǔn)位。
8x8 MIMO 零件列表(表1) 包含了用來建置8x8 MIMO 測試臺的組件。 所有組件都是標(biāo)準(zhǔn)的現(xiàn)成零件。
| 數(shù)量 | 零件 | 數(shù)量 | 零件 | |
| 16 | SMA 連接的磁性天線 | 8 | 3 向的公-母-公BNC「T」 | |
| 16 | NI USRP-2920 套件 | 16 | 公BNC 至公SMA 的接線 | |
| 8 | USRP MIMO 同步化與數(shù)據(jù)接線 | 1 | 10 端口的Gigabit 以太網(wǎng)絡(luò)切換器 | |
| 2 | Trimble Thunderbolt (Ref + PPS) | 1 | 桌面計(jì)算機(jī)(Dell 計(jì)算機(jī)搭載Intel Xenon 處理器) | |
| 9 | Cat 5 以太網(wǎng)絡(luò)接線 | 1 | PCIe Gigabit 以太網(wǎng)絡(luò)卡(Intel 芯片組) | |
| 4 | 0.3 公尺的BNC 轉(zhuǎn)BNC 接線 | 1 | 顯示器、鍵盤、鼠標(biāo) | |
| 4 | 3 向的母BNC「T」 |
表1. 8x8 MIMO 零件列表
數(shù)據(jù)總線帶寬
GbE 連接功能可在USRP 設(shè)備與主計(jì)算機(jī)之間提供專屬連結(jié),讓USRP 以高達(dá)25MS/s 的全雙工模式運(yùn)作。 就MIMO 測試臺而言,16 個(gè)USRP 能有效共享同一個(gè)以太網(wǎng)絡(luò)鏈接,并且在所有通道間有效分配帶寬。 首先,計(jì)算單一USRP 全速運(yùn)作的數(shù)據(jù)傳輸率為何(等式1),我們發(fā)現(xiàn)在不考慮任何通信處理時(shí)間的前提下,會用到80% 的1Gb 以太網(wǎng)絡(luò)帶寬。

等式1:1 GbE 的單一信道IQ 速率最大理想值
文字框: 圖5。8 通道同步化Rx 方塊圖(Part I)。測試臺內(nèi)的整個(gè)Tx 與Rx 系統(tǒng)會共享單一1 GbE 連接,并且回傳至主計(jì)算機(jī)(已連接未受管理的標(biāo)準(zhǔn)1 GbE 切換器)。IQ 速率最大值會除以共享相同以太網(wǎng)絡(luò)鏈接的USRP 設(shè)備數(shù)量,此外還有額外的處理時(shí)間可用來同時(shí)管理多個(gè)設(shè)備。至于8x8 MIMO,IQ 速率的最大理想值為25MS/s IQ 速率除以8 (等式2),因此每個(gè)傳送器與接收器的3MHz 基帶頻寬皆可分配到3MS/s 左右。只要在同一個(gè)主計(jì)算機(jī)內(nèi)加入專屬的1 GbE 控制器,即可提高最大理想值;不過內(nèi)存與處理器瓶頸仍可能影響效能。

等式2:共享l GbE 連接的8 個(gè)天線IQ 速率最大理想值
就目前的測試臺狀態(tài)而言,每個(gè)不同的天線(共8 個(gè)) 都有1MS/s 的IQ 速率。
4. MIMO 系統(tǒng)軟件架構(gòu)
就LabVIEW 來說,MIMO 系統(tǒng)軟件架構(gòu)可分為2 個(gè)部分:
1.NI-USRP 硬件驅(qū)動程序
2.主機(jī)架構(gòu)的通信程序代碼
NI-USRP 硬件驅(qū)動程序可讓所有的USRP 設(shè)備執(zhí)行傳送或接收作業(yè),而且只要通過一組驅(qū)動程序呼叫組件即可加以設(shè)定并控制。硬件驅(qū)動程序與主機(jī)之間的接口采用主機(jī)架構(gòu)的通信程序代碼,屬于基帶IQ 數(shù)據(jù)的二維數(shù)組,每一列(row) 都代表了單一天線的復(fù)雜時(shí)域IQ 數(shù)據(jù)。 接著可藉由LabVIEW 環(huán)境內(nèi)多個(gè)運(yùn)算模型來執(zhí)行主機(jī)架構(gòu)的信號處理功能,其中包含圖形化LabVIEW 架構(gòu)的算法、LabVIEW MathScript RT 內(nèi)的.m 檔案腳本,或是可通過LabVIEW Call Library Node 存取的C 函式。
MIMO 搭配NI-USRP 驅(qū)動程序
所有8 個(gè)傳送器都會在單一傳送階段內(nèi)進(jìn)行設(shè)定,而所有8 個(gè)接收器都會在單一接收階段內(nèi)進(jìn)行設(shè)定(圖6)。
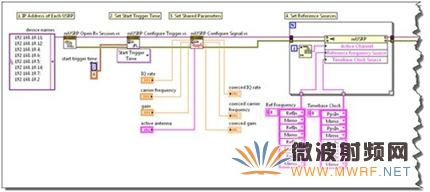
圖6. 8 信道同步化的Rx LabVIEW 程序方塊圖(Part I)
以MIMO 系統(tǒng)的Rx 端為例,設(shè)定與同步化流程包含6 個(gè)步驟:
1.在逗點(diǎn)分隔表中指定每個(gè)USRP 的IP 地址,以便開啟Rx Session。
2.設(shè)定Start Trigger Time (單位為整數(shù)秒或分?jǐn)?shù)秒),代表所有USRP 設(shè)備開始擷取數(shù)據(jù)的時(shí)間。
3.設(shè)定所有8 個(gè)設(shè)備共享的參數(shù)。
4.指定哪些設(shè)備會使用外接參考或MIMO 接線。
5.將時(shí)基設(shè)為0 (僅限于PPS 頻率信號下個(gè)升緣具有外部PPS 連接的USRP 設(shè)備)。 注意: 信道表說明了需要此設(shè)定的設(shè)備。
6.使用單一驅(qū)動呼叫元來擷取數(shù)據(jù),并以復(fù)雜樣本的二維數(shù)組送回,其中每一列都包含了單一天線的復(fù)雜IQ 波形。
一旦啟動會話之后,系統(tǒng)就會開始從所有的USRP 設(shè)備擷取時(shí)序同步化的連續(xù)樣本,并且做為二維數(shù)組通過NI-USRP Fetch 指令回傳至LabVIEW,數(shù)組中的每一列都是一個(gè)獨(dú)立通道。 接著樣本輸入數(shù)量會指定每次Fetch 操作需要擷取的樣本數(shù)量。 在此情況下(圖6),我們會記錄每一列,再將每個(gè)信道的I/Q 信號配置到各自的圖形中。
8x8 MIMO 主機(jī)架構(gòu)的通信作業(yè)
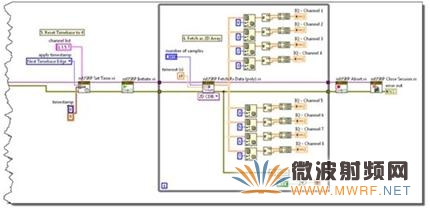
圖6. 8 信道同步化的Rx LabVIEW 程序方塊圖(Part II)
位于美國奧斯汀的德州大學(xué)設(shè)有無線網(wǎng)絡(luò)與通信團(tuán)體(Wireless Networking and Communications Group,WNCG),Robert Heath 教授與研究生Jackson Massey 采用此硬件與驅(qū)動軟件框架,打造出使用QPSK 符號的LabVIEW 架構(gòu)MIMO-ODFM 鏈接 (圖2)。 這種可擴(kuò)充的程序代碼可讓MIMO 設(shè)定從2x2 擴(kuò)充至8x8,只要開啟或關(guān)閉USRP 設(shè)備就行了。 隨機(jī)數(shù)據(jù)位會對應(yīng)至QPSK 符號,接著這些符號會通過62.5-kHz 帶寬對應(yīng)至128 OFDM 子載波(其中有些通道無效,有些則是用于培訓(xùn))。 循環(huán)式的前置區(qū)段(Cyclic Prefix) 會插入內(nèi)含20 個(gè)OFDM 符號的組合,并且建立Preamble。 最終的IQ 波形會分為平行串流,接著以系數(shù)16 進(jìn)行升取樣。最后會以1 MS/s 的速度產(chǎn)生IQ 樣本的二維數(shù)組,而且每個(gè)USRP 設(shè)備(共8 個(gè)) 都會采用NI-USRP Write 函式來傳送特殊符號。
至于接收端,來自NI USRP 驅(qū)動器的數(shù)據(jù)擷取率為1MS/s,接著進(jìn)行分析以偵測OFDM 框架位置。 抽出框架后,LabVIEW 架構(gòu)的軟件就會估計(jì)頻率偏移并加以修正。 接著信號會區(qū)分為與FFT 尺寸相同的區(qū)塊,同時(shí)加上循環(huán)式前置區(qū)段,F(xiàn)FT 再套用至每個(gè)區(qū)塊。 無效音調(diào)(Null Tone) 會遭到移除,通信培訓(xùn)信息可用來估計(jì)并修正多路徑干擾現(xiàn)象, 而引導(dǎo)音調(diào)(Pilot Tone) 則是用來估計(jì)并修正每個(gè)子載波的增益與相位移轉(zhuǎn)。 最終的QPSK 星座圖則會針對每個(gè)通道(共8 個(gè)) 進(jìn)行配置。
LabVIEW 可混合不同的運(yùn)算模型,以便快速制作OFDM 系統(tǒng)原型。OFDM 連結(jié)有許多面向都已在客制化的.m 檔案腳本中實(shí)作。 模擬環(huán)境內(nèi)的.m 檔案腳本可通過MathScript RT Node (圖7) 直接整合至LabVIEW 以便立即執(zhí)行,只需要小幅度的修改即可。
圖7. 使用 LabVIEW MathScript RT Node 整合.m 檔案腳本
5. 評估系統(tǒng)
使用USRP 來設(shè)計(jì)專屬的MIMO 測試臺時(shí),請務(wù)必考慮到實(shí)時(shí)執(zhí)行、相位校正vs. 相位同調(diào)、運(yùn)用以太網(wǎng)絡(luò)卡達(dá)到最高的數(shù)據(jù)傳輸率等事項(xiàng)。
實(shí)時(shí)執(zhí)行與延遲時(shí)間
系統(tǒng)與NI-USRP 驅(qū)動程序可納入共8 個(gè)傳送器與8 個(gè)接收器,以超過2MS/s 的速度串流復(fù)雜的基帶IQ 信號,并且實(shí)時(shí)處理信號。 但因?yàn)樘幚頃r(shí)間的關(guān)系,傳輸率會降低為每200 毫秒(ms) 1 個(gè)OFDM 框架,才能確保在Windows 系統(tǒng)內(nèi)實(shí)時(shí)執(zhí)行。OFDM 范例程序代碼的約略數(shù)據(jù)傳輸率計(jì)算方式如下:

等式3: 攜帶數(shù)據(jù)的OFDM 子信道

等式4:OFDM 測試臺數(shù)據(jù)傳輸率
最終的數(shù)據(jù)傳輸率為122.8Kb/s (62.5Khz 帶寬的通道)。 此設(shè)定可達(dá)到1.9648 位/秒/Hz 的數(shù)據(jù)傳輸率,這是相當(dāng)可觀的數(shù)字。
請注意,此配置尚未經(jīng)過效能優(yōu)化處理,而是直接采用之前僅用于仿真的算法。 如果再進(jìn)一步優(yōu)化可能會大幅提高效能。
相位校正vs. 相位同調(diào)
所有USRP 皆共享通用的10-MHz 參考后,相位同調(diào)局部震蕩器(LO) 即可通過分?jǐn)?shù)N 頻率的方式來處理合成作業(yè)。 在合成過程中,參考頻率會被劃分,此外升緣與降緣的相位可能會鎖定,針對每個(gè)通道產(chǎn)生固定的任意相位偏移。 就MIMO 通信而言,負(fù)責(zé)執(zhí)行多路徑評估與修正的算法也會一并修正這些固定的任意相位偏移現(xiàn)象。
不過波束賦形應(yīng)用則需要LO 的相位校正,所以會通過基帶I/Q 來控制并擷取此相位。此外也有更有效的方式,那就是使用已知的參考信號來偵測USRP 的相位偏移,并且針對方向?qū)ふ遗c波束賦形等研究將修正項(xiàng)目套用至接收到的信號。
達(dá)到完整的1 Gigabit 以太網(wǎng)絡(luò)數(shù)據(jù)傳輸率
如要達(dá)到完整的1 Gigibit 以太網(wǎng)絡(luò)數(shù)據(jù)傳輸率,就會需要最佳設(shè)定的網(wǎng)絡(luò)卡,以及順暢整合網(wǎng)絡(luò)卡/內(nèi)存/處理器的計(jì)算機(jī)。 一般來說最理想的組合就是桌面計(jì)算機(jī)搭配Intel 的以太網(wǎng)絡(luò)控制器芯片組,同時(shí)還具備較新的驅(qū)動功能,例如要關(guān)閉「Energy Efficient Ethernet」,計(jì)算機(jī)的「Power Options」則得設(shè)為「High Performance」。
6. 結(jié)論
隨著MIMO 通信研究日漸普遍,NI USRP 硬件與LabVIEW 軟件則提供了理想的平臺,可快速制作新的算法原型并加以檢驗(yàn)。 這樣的組合可提供優(yōu)異的彈性與效能,有助于建置簡便的2x2 MIMO 系統(tǒng),而且還可擴(kuò)充為進(jìn)階的8x8 MIMO OFDM 測試臺。 有了現(xiàn)成的NI USRP SDR 硬件,研究人員即可迅速建立測試臺,評估算法,分享可復(fù)制的研究結(jié)果。 如果將LabVIEW 用于開發(fā)作業(yè),就可以整合現(xiàn)有的IP (例如.m 檔案腳本),同時(shí)根據(jù)個(gè)人需求輕松運(yùn)用各種SDR 硬件平臺,無論是主機(jī)架構(gòu)的USRP 原型制作流程,還是PXI 架構(gòu)的儀器質(zhì)量MIMO 都沒問題。 如要開始準(zhǔn)備這類應(yīng)用,請先前往 ni.com/usrp/zht/ 取得更多USRP 軟件定義無線電的相關(guān)信息。
7. 參考數(shù)據(jù)
[1] A. Paulraj, A.J., “An overview of MIMO communications - a key to gigabit wireless”, Proceedings of the IEEEE, vol. 92, no. 2, pp. 198-218, Feb 2004.
[2] 3GPP TR 36.913 V9.0.0 (2009-12), “Requirements for Further Advancements of E-UTRA (LTE-Advanced).”
[3] J. W. Massey, J. Starr, Seogoo Lee, Dongwook Lee, A. Gerstlauer, and R. W. Heath Jr. Implementation of a real-time wireless interference alignment network. To appear in the Proc. of the Asilomar Conference on Signals, Systems and Computers, 2012. (6x6 MIMO Code available on the USRP Code Sharing Community)
 粵公網(wǎng)安備 44030902003195號
粵公網(wǎng)安備 44030902003195號