整合型MIMO收發(fā)器 提升微型/微微型基站系統(tǒng)性能
MIMO (多重輸入輸出)運(yùn)用技術(shù)和射頻的波束成型技術(shù)已被證明是在寬帶無(wú)線接入(BWA)系統(tǒng)上,可達(dá)到最高數(shù)據(jù)吞吐量和高頻譜利用效率的技術(shù)。在這些系統(tǒng)中,關(guān)鍵點(diǎn)是對(duì)已知射頻路徑的調(diào)相,并同時(shí)對(duì)所有信號(hào)取樣。
為了滿足這些要求,系統(tǒng)設(shè)計(jì)人員通常使用一個(gè)屬于單一本地振蕩器(LO)來(lái)源的共同參考頻率,并分給兩個(gè)獨(dú)立的通道。基站接收器的線性規(guī)格和發(fā)射器的誤差矢量振幅值(EVM)規(guī)格,以往會(huì)要求混合式的實(shí)作形式,納入各級(jí)整合方塊,并選擇個(gè)別的高性能低噪聲放大器(LNA)、混頻器、增益方塊和轉(zhuǎn)換器,以滿足系統(tǒng)的目標(biāo)。
在具有2RX×2TX能力的現(xiàn)代積體組件上,其性能水平已經(jīng)足以將這些系統(tǒng)的實(shí)作,包括高性能的內(nèi)建接收器、發(fā)射器、合成器和轉(zhuǎn)換器都共存于一個(gè)組件上。
事實(shí)上,整合組件的性能已經(jīng)從以客戶端設(shè)備(CPE)定位的產(chǎn)品,到微微型基站及微型基站(Pico and Micro-basestation)性能水平的產(chǎn)品,并且迅速接近完整基站的性能水平。高性能2×2整合組件已經(jīng)面世,并且是用來(lái)實(shí)現(xiàn)射頻同步的最佳選擇,因?yàn)槿绱吮憧晒蚕斫M件上所有的資源。
為了發(fā)揮MIMO概念的優(yōu)點(diǎn),系統(tǒng)規(guī)劃人員定義4×4、8×8,甚至更復(fù)雜的配置。隨著系統(tǒng)復(fù)雜度增加,同步化的工作也隨之增加,材料清單亦然。本文介紹了整合型收發(fā)器如何通過(guò)減少?gòu)?fù)雜度、組件數(shù)量和成本來(lái)簡(jiǎn)化設(shè)計(jì),并同時(shí)能夠?qū)崿F(xiàn)出色的微微型基站及微型基站系統(tǒng)性能。
整合型收發(fā)器有利同步系統(tǒng)要求
為了產(chǎn)生所要求的射頻波束成型樣式,兩個(gè)射頻信號(hào)之間的固定關(guān)系必須存在于MIMO系統(tǒng)所有信道的兩兩之間。傳統(tǒng)上用來(lái)建立這些關(guān)系的方法是分配共享合成器的輸出給接收方塊和發(fā)射方塊,這樣它們都會(huì)具有完全相同的調(diào)相,確切的路徑可以特征化并校準(zhǔn),使通道之間的相位差可以求得。一旦建立了關(guān)系,波束成型技術(shù)可以用來(lái)實(shí)現(xiàn)所要求的接收或發(fā)射樣式。
對(duì)于2×2的MIMO系統(tǒng)而言,整合收發(fā)器的選擇顯示于圖1的虛線框內(nèi),可以用來(lái)有效實(shí)現(xiàn)同步系統(tǒng)。接收器和發(fā)射器的組件都有一個(gè)共同的LO路徑,以便信道的調(diào)相在任何時(shí)候都是固定的。
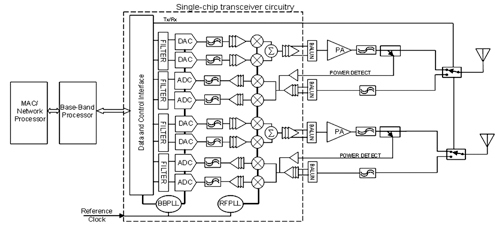
圖1 2×2 MIMO基站架構(gòu)
在4×4或8×8(甚至信道更多)的系統(tǒng),基帶處理器使用的參考信號(hào),其同步化須要實(shí)現(xiàn)整個(gè)系統(tǒng)的一致性。使用全球衛(wèi)星定位系統(tǒng)(GPS)鎖定頻率發(fā)生器來(lái)同步化基帶頻率將會(huì)在相關(guān)的文章中探討,但同步化這個(gè)基本的問(wèn)題也會(huì)在這里解決,因?yàn)橥交鶐Ш蜕漕l兩者,同樣會(huì)用來(lái)同步整合的系統(tǒng)。
基帶同步為射頻調(diào)相技術(shù)關(guān)鍵
所有的組件被同步到相同的參考頻率還必須參照一個(gè)在射頻信道上已知的相位。正如剛才提到的整合解決方案包含必要的LO產(chǎn)生電路,這樣就可以簡(jiǎn)單利用內(nèi)建的資源簡(jiǎn)化2×2的系統(tǒng)。然而在高階系統(tǒng),射頻同步化的任務(wù)更加復(fù)雜。
每個(gè)組件的信道合成器利用其自身的鎖相回路(PLL),產(chǎn)生一個(gè)誤差信號(hào)來(lái)強(qiáng)制讓原本頻率自由振蕩的壓控振蕩器(VCO)對(duì)準(zhǔn)到所需的頻率。將多個(gè)整合組件的VCO同步化,使它們的相位一致是非常困難的。正因?yàn)槿绱耍o所有組件共享一個(gè)外接LO會(huì)消除這些問(wèn)題。可以外接LO的組件顯然最適合這樣的任務(wù)。
單芯片2×2的MIMO組件,如業(yè)者已推出包含同步化電路,用來(lái)調(diào)整基帶合成器的頻率邊緣。此外,該組件除了能夠?qū)ι漕l輸出信號(hào)進(jìn)行取樣之外,還包含外接LO的能力。有了基帶同步化以及已知射頻輸出信號(hào)的相位,應(yīng)用射頻調(diào)相技術(shù)的功能便可以設(shè)計(jì)出來(lái)。
圖2顯示業(yè)者所推出單芯片2×2的MIMO組件的簡(jiǎn)化方塊圖。要產(chǎn)生給定系統(tǒng)的一個(gè)特定取樣率,會(huì)使用一個(gè)N分頻PLL,可在40MHz的范圍內(nèi)的任何參考頻率中,合成出基帶頻率參考信號(hào)。對(duì)于2×2的系統(tǒng),參考頻率可以是內(nèi)含的或外接的。基帶頻率是在兩個(gè)接收器和兩個(gè)發(fā)射器之間共享,所以并不須要另外設(shè)計(jì)同步化功能。同樣的,射頻LO是共享的,所以RX和TX信號(hào)的相位一致性則是與生俱來(lái)。

圖2 單芯片2×2的MIMO組件方塊圖
對(duì)于4×4及具有更多信道的基站系統(tǒng),通常可用GPS鎖定外部參考頻率,因此所有收發(fā)器組件都會(huì)假定有這個(gè)功能并加以利用。從基帶控制器發(fā)出同步化脈沖的應(yīng)用上,組件的基帶PLL被有計(jì)劃的重置,因而達(dá)到基帶頻率的相位對(duì)準(zhǔn)。在圖3中是個(gè)兩組件的示意圖,但是可以用更多的組件以相同的方法串接下去。

圖3 業(yè)者推出的基帶多芯片同步示意圖
選擇具有所需數(shù)據(jù)速率的整數(shù)倍參考頻率頻率,將使得BBPLL運(yùn)行在整數(shù)模式,所以不會(huì)發(fā)生N分頻合成才會(huì)有的抖動(dòng)。例如圖4說(shuō)明了對(duì)于一個(gè)標(biāo)準(zhǔn)的全球微波存取互通接口(WiMAX)10MHz通道,取樣率需要的是11.2MHz,所以會(huì)使用頻率44.8MHz的外接振蕩器。SYNC_IN脈沖的時(shí)序相對(duì)來(lái)說(shuō)就不算太嚴(yán)格。
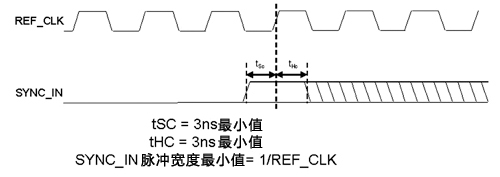
圖4 MIMO組件基帶多芯片同步SYNC_IN脈沖時(shí)序
BBPLL的同步,可以通過(guò)在示波器上觀察每顆芯片的BBPLL頻率輸出來(lái)檢查。它們?cè)谕匠绦蛲瓿珊缶蜁?huì)重疊。借著配置單芯片2×2 MIMO組件的某一支可程序輸出接腳作為BBCLK,便可以很容易地以基帶控制器,或是在示波器上顯示,將BBPLL同步測(cè)量出來(lái)(圖5、圖6)。
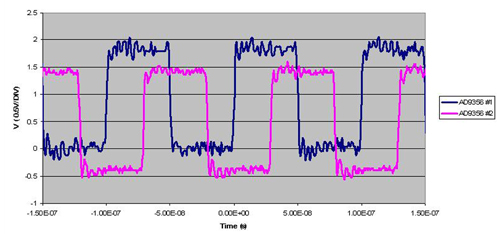
圖5 在同步之前單芯片2×2的MIMO組件IC1與IC2的頻率信號(hào)圖(初始階段為隨機(jī))。
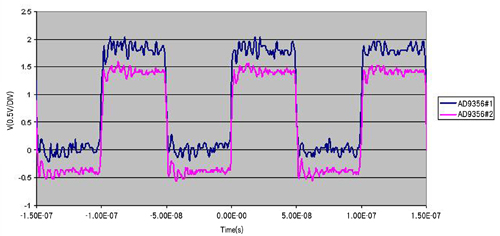
圖6 在同步之后,單芯片2×2的MIMO組件IC1與IC2的頻率信號(hào)(相位對(duì)齊)
業(yè)者推出的兩款產(chǎn)品VCO,結(jié)構(gòu)差別在于已開啟信道信號(hào)的產(chǎn)生方式。一個(gè)在VCO產(chǎn)生信道頻率的兩倍頻如在2.5GHz操作下,其VCO頻率為5GHz。另一組件則是VCO產(chǎn)生信道頻率的四或三倍頻如在3.6GHz操作下,其VCO頻率為4.8GHz。內(nèi)部合成器提供約-40dB(1%)EVM的卓越性能,但這兩顆芯片也已經(jīng)可以使用外接LO來(lái)源,因?yàn)椋绱艘粊?lái),便可以得到更高的性能。如果使用一個(gè)適當(dāng)?shù)牡驮肼曂饨覮O信號(hào),EVM性能可提高到優(yōu)于-45dB(0.56%)。
在多芯片系統(tǒng),需要多重天線波束成型如4TX×4RX,這時(shí)共同外接LO就可以保證組件間的相位一致性。如前所述,應(yīng)用于前述兩種組件上的LO信號(hào)不是直接用作信道頻率。這里用到的LO在芯片上被分給自行運(yùn)作的分頻器,用來(lái)產(chǎn)生已開啟通道的LO。因此,簡(jiǎn)單地采用外接LO就不用同步,但兩個(gè)組件之間的調(diào)相,仍可以通過(guò)交叉耦合(Cross-coupling)現(xiàn)有的功率檢測(cè)器,很容易地測(cè)定出來(lái),然后一起比較兩個(gè)接收信道的數(shù)據(jù)樣本。在VCO頻率是倍頻的組件中,所以產(chǎn)生的TX信號(hào),其相位不是同相就是超出180度。而另一組件采用了四或三倍頻的VCO/信道頻率關(guān)系,由此產(chǎn)生的TX信號(hào)相位將會(huì)是四種可能值之一,不是0度,就是90、180或270度。在4TX乘4RX系統(tǒng)下,要測(cè)定TX信號(hào)相位的電路連接圖介紹見圖7。
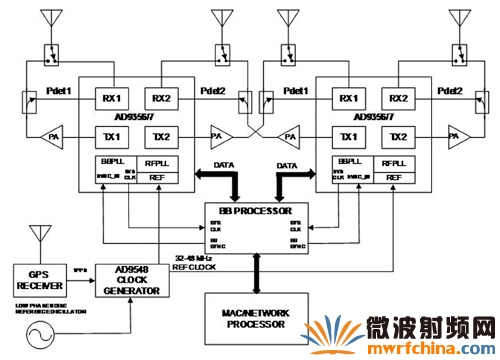
圖7 MIMO組件用于4Tx乘4Rx連接的射頻相位測(cè)量圖
若使用VCO頻率是倍頻的組件,其結(jié)果如圖8。該圖是畫出由接收通道1取樣到的I值到由接收通道2取樣到的I值,接收通道1是連接到同一個(gè)芯片的某一個(gè)發(fā)射器輸出端,而接收通道2則是連接到系統(tǒng)中另一個(gè)芯片的某一個(gè)發(fā)射器輸出端。在第一張圖中,很容易測(cè)定該LO分頻器是與TX信號(hào)同相,只在時(shí)間軸上有略微的偏移。在第二個(gè)圖中,也很容易測(cè)定兩組件之間的TX信號(hào)大約超出相位180度。在這些組件中,LO分頻器是自行運(yùn)作的,因此相位不能預(yù)先測(cè)定,然而一旦進(jìn)行測(cè)量,且產(chǎn)生信號(hào)的相位是已知的,正確的偏移補(bǔ)償可用于實(shí)現(xiàn)波束成型算法。同理,采用了四或三倍頻的VCO/信道頻率組件中,其四個(gè)可能的相位如圖9所示。
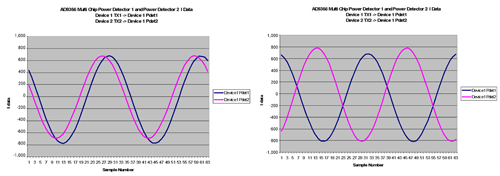
圖8 MIMO組件射頻相位測(cè)量I的數(shù)據(jù),左圖為0度、右圖為180度,外接LO驅(qū)動(dòng)。與理想相位之間的偏移是由于輕微的電線長(zhǎng)度不匹配。
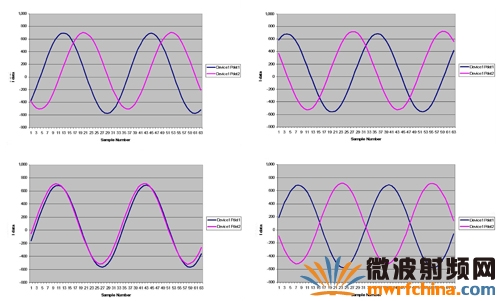
圖9 另一組MIMO組件射頻相位測(cè)量數(shù)據(jù),其射頻相位為0、+90、-90和180度都有可能,因?yàn)槭怯煤铣善鬏敵龇诸l器,并外接LO驅(qū)動(dòng)。為每個(gè)新的工作頻率下的調(diào)相都會(huì)測(cè)量到,并保持下去。
由于組件使用直接轉(zhuǎn)換,這個(gè)通過(guò)功率檢測(cè)器和通過(guò)接收器測(cè)量的信號(hào),須要從信道的中心被偏移。這些組件包括了能夠生成偏移連續(xù)(Continuous Wave, CW)音,在這里是指TestTone的功能,方便進(jìn)行相位測(cè)量。當(dāng)基帶頻率同步時(shí),TestTone將在兩個(gè)組件上產(chǎn)生同樣的相位。很容易依照所產(chǎn)生數(shù)據(jù)樣本的結(jié)果來(lái)做直接比較和相位測(cè)量。
使用交叉耦合發(fā)射器,以同樣的方式,系統(tǒng)可以利用這一技術(shù)來(lái)測(cè)定芯片之間的調(diào)相,以建立任何N×N規(guī)模的MIMO數(shù)組。對(duì)于成本非常敏感的應(yīng)用,交叉耦合技術(shù)在利用芯片內(nèi)建合成器的情況下,還是可以應(yīng)用在組件上。雖然內(nèi)部LO的相位不像外接LO的情況下可以預(yù)測(cè),但仍然可以用同樣的方式測(cè)量,在給定頻率的命令之下,組件之間的相位關(guān)系仍將保持不變。這對(duì)要求成本效益更高的解決方案還是有幫助的,而相較于最佳EVM的解決方案,只有些微不利的影響。
寬帶無(wú)線接入基站使用了MIMO和射頻波束引導(dǎo)技術(shù),以實(shí)現(xiàn)最大的覆蓋范圍和細(xì)胞負(fù)載量。成功實(shí)作的關(guān)鍵是測(cè)量RF信號(hào)相位的能力與基帶取樣頻率的同步。
整合型收發(fā)器的性能已經(jīng)取得重大進(jìn)展,使其可以用在新的設(shè)計(jì)中。使用上述的技術(shù),通過(guò)整合型組件可節(jié)省的可觀電力、重量、組件數(shù)量以及最重要的成本,這些應(yīng)用產(chǎn)品便可以達(dá)到優(yōu)越的性能。
作者:Rick Myers,ADI半導(dǎo)體公司
 粵公網(wǎng)安備 44030902003195號(hào)
粵公網(wǎng)安備 44030902003195號(hào)