科技始終來自人性,一語道出科學與技術皆由人類的欲望所生。在講求經濟效益與效率的現代,人類進一步整合計算機與機器,創造機器人以期能夠增加工作效率,或是代替人類執行一些具危險性的工作,因此機器人的相關技術研發將會越來越受重視。
本文所開發的機器人作品以盛群半導體八位微控制器(MCU)為核心,具有計程、位置推算、紅外線傳感避障、中文語音提示、地磁角度測量、地磁角度修正等功能,使用個人計算機(PC)或筆記本電腦(Notebook)當作主控,撰寫人機接口主控程序,以射頻(RF)無線模塊進行溝通,主控計算機可下達指令給機器人并接收機器人的狀態回傳數據。本文設計的主題是將此機器人群控系統應用于兩種機器人隊形變換,分別是橫縱隊形變換跟四角位置隊形變換。
主控/受控系統架構搭載RF傳輸
目前規劃的群體機器人隊形變換,初步分為兩種隊形,隊形1為多橫列與縱列隊形的交換,隊形2為原本位于四個角落的機器人做位置的變換,雖然兩種隊形的排程有不小的差異性,但其系統架構是相同的,可分為主控計算機端與受控的群組機器人端(Slave)。
在此群體機器人的動作完全由主控端下達命令而后動作,動作執行完成,隨即向主控端回傳動作狀態;而主控端依據機器人的回傳狀態,決策群體機器人的動作,其整體的架構模式皆如圖1所示,其計算機端的監控接口與受控機器人端的間的通信皆是建立在無線射頻通信平臺上,并且使用RS-232的通信協議,通過所配置的無線電模塊nRF905以無線射頻方式進行數據的傳輸。
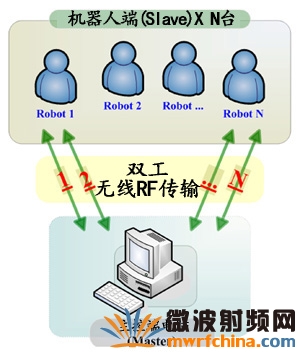
圖1 系統架構
無線通信滿足串行信號傳輸需求
主控計算機端的無線傳輸部分,主要是使用RS-232串行傳輸與無線RF模塊的RxD腳位、TxD腳位及共地腳位進行數據傳輸,主控計算機端有兩種方式與無線RF模塊進行串行傳輸,第一種方式(圖2),當計算機RS-232傳輸端口不足時,我們可使用計算機端的通用串行總線(USB)傳輸埠,經由IC PL2303所設計的USB轉RS-232模塊,將通過USB協議傳輸進來的數據,轉換為RS-232串行輸出信號,再與無線RF模塊的RxD腳位進行通信數據傳送和TxD腳位進行通信數據接收,只要注意好彼此的傳輸波特率(Baud Rate)以及相關通信協議是否一致,即可由主控計算機端下達命令至無線RF模塊或是接收由無線RF模塊回傳的信號,進行無線通信傳輸;第二種方式(圖3),當計算機RS-232傳輸端口足夠時,我們使用計算機端的RS-232傳輸埠,不過基于無線RF模塊的信號準位為0伏特(V)或5伏特,而計算機端的RS-232的電壓準位為+12伏特或-12伏特,兩端的電壓準位不一致,所以須使用IC HIN232進行電壓準位轉換,轉換后仍須注意彼此的Baud Rate以及相關通信協議是否一致,才能達成RS-232串行通信傳輸。
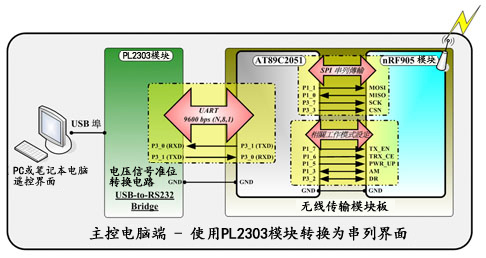
圖2 計算機端通信架構-1
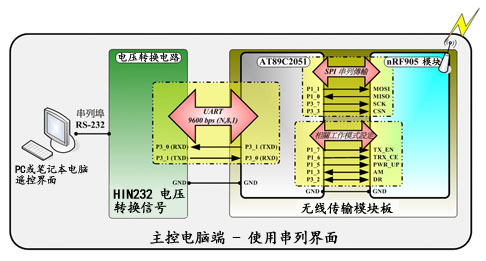
圖3 計算機端通信架構-2
方向傳感提升機器人路徑設計精準度
設計群控機器人路徑規劃系統前(以下簡稱群控機器人系統),首先將提升小機器人所具備的能力,包含方向傳感能力(加入電子羅盤傳感地磁角度)、閃避障礙物能力、語音提示能力(具體語音提報功能以告知命令下達者)、機器人行走路徑計算能力(行走期望距離或計算出已行走的距離長度),以及動作完成數據回傳能力(利于計算機端對機器人群的整體監控)等,使機器人本身的基本功能更符合路徑規劃的功能要求。
計算機端的監控接口是以一個無線通信模塊,對多臺機器人下達命令,在此架構下,如何讓監控接口可以對群控機器人端的掌握更具便利與靈活性,借以對群控機器人的路徑規劃帶來幫助,本系統將通過對動作命令數據編碼的方式,進一步將機器人端的動作規劃為單個運動模式、多個運動模式與同步運動模式。
單個運動模式的動作意義為各司其職,假設該臺機器人接收到動作要求時,立即執行其動作命令;多個運動模式的動作意義為群體機器人在同一時間點啟動并且做相同動作;同步動作模式的動作意義與單個運動模式的意義類似,差異在機器人接收到動作命令時,并不立即執行命令要求,必須等待另一同步啟動命令,而后再同時啟動并執行該機器人已接收的命令動作。
感光模塊/電子羅盤協助判斷行徑方向
如圖4所示,為機器人的整體架構圖,環境傳感器方面有感光模塊與電子羅盤模塊,使得機器人具有方向傳感的能力,這將為機器人在路徑規劃上,帶來很大的幫助;而計程傳感器的Encoder脈波信號精度達到0.185公分的傳感單位,提升了路徑規劃的精確性,另外紅外線避障模塊可以判斷障礙物,以及是否到達棋盤式實驗平臺的交點。
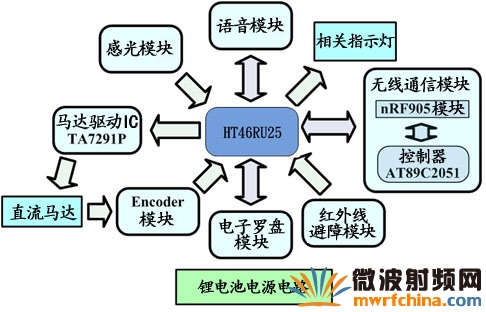
圖4 機器人整體架構
圖5為群控機器人系統的人機接口,此監控接口是使用寶蘭(Borland)C++ Builder所撰寫設計,利用此人機接口就可對系統中的機器人下達命令,且當機器人執行完計算機端所下達的命令后,會將執行結果回傳給此監控接口,達成機器人群體監控的目的。
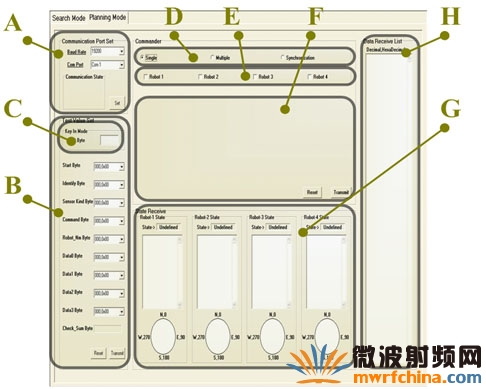
圖5 群控機器人系統人機接口
接下來由圖中所標示的編號,逐一做說明,編號A為計算機端與無線RF通信模塊的通信端口對應設定,設定內容包含RS-232通信端口選擇與Baud Rate選擇,因為計算機端的人機接口是以RS-232對外做溝通,因此務必先設定此部分,才能啟動人機接口的各項對外數據傳輸動作;編號B提供操作者自行選擇所要傳輸的數據組合,且也可使用編號C的鍵盤輸入模式,確定好要傳出的數據后,按下傳送鍵,即送出數據。
編號D為機器人單個、多個、同步動作模式的選擇區,當選擇單個或同步運動模式時,編號E區塊才會顯現,原因為多個運動模式下,并不須要判別是哪只機器人該接收動作命令數據,所以只須下達一組命令,也因此編號F部分只會出現一組命令選擇窗口;編號F為各編號機器人的命令下達選擇區域;編號G區塊為各機器人的回傳數據狀態顯示與統計區,然而群控機器人系統,目前使用四臺機器人,因此,規劃了四組個別顯示區域,為Robot-1 State~Robot-4 State;編號H區塊為顯示,計算機端所接收到來自于機器人端回傳的所有數據。
路徑修正/避障偵測/命令接收軟件不可或缺
群控機器人系統的機器人軟件設計,具備功能包含使機器人利于隊形變換應用的路徑規劃上如單個、多個、同步運動模式功能。依計算機端監控接口所設定的運動量,執行前進、右旋、后退、右旋等動作,且前進時具有避障功能。依計算機端監控接口所設定的運動量,并依據脈沖寬度調變器(PWM)速度參數,執行前進、右旋、后退、左旋等動作,且前進時,機器人具備直線前進的修正功能。
設計可依計算機端監控接口的命令,執行前進、右旋、后退、左旋等動作,并且計算其總動作量。機器人面向角度測量(電子羅盤傳感)。機器人面向角度修正功能(依據電子羅盤的傳感值)。語音提示功能,執行完上述的動作后,皆會語音提示相關狀態。狀態回傳,執行完命令后,皆會傳送出相關數據至計算機端監控接口。
掌握群控機器人基本運動 有效達成路徑規劃測試
此實驗目的為測試群控機器人路徑規劃的監控接口,是否能順利對四臺不同編號機器人下達工作命令(包含單個、多個、同步運動等模式下的機器人功能測試),且測試此接口是否可正確的顯示與統計出各機器人運動的信息,這些步驟對于群控機器人的路徑規劃是必須的,能掌握機器人的動作狀態,才能有效的規劃群控機器人的路徑。
如圖6所示將四臺機器人放置在桌面,由左至右,機器人的編號為1~4號,接下來逐一對機器人下達動作命令。基于上述的單個運動模式測試,驗證了已可由計算機端的監控接口,監控各機器人的運動狀態。
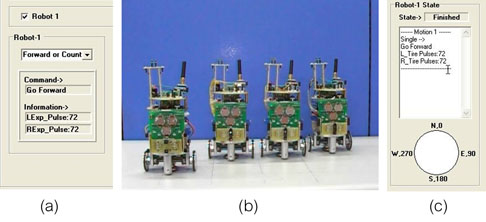
圖6 單個運動模式動作測試。(a)為監控接口傳出的動作命令組合,(b)為機器人執行命令動作后相對位置,(c)為機器人完成動作后的狀態回傳。
橫隊變縱隊/角線變換易如反掌
欲使四臺機器人由圖7(a)所示的橫隊隊形,變換成圖7(e)的縱隊隊形,依表1的同步命令數據,逐一由監控接口下達,如圖7(a)~(e)所示,機器人群將逐步完成,由橫隊變成縱隊的路徑規劃(其每個步驟都為同步動作模式,因此每個步驟皆是同時啟動而執行的),而完成此路徑規劃的狀態回傳,則如圖8所示,包含機器人收到同步數據的回傳機制。因此,驗證了使用群控機器人路徑規劃系統的同步命令模式,逐次下達動作命令,可使機器人群由橫隊隊形變換為縱隊隊形的路徑規劃,在此設計者盡量以最短運動量完成所要的隊形變換。
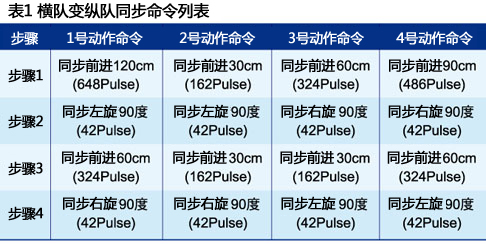
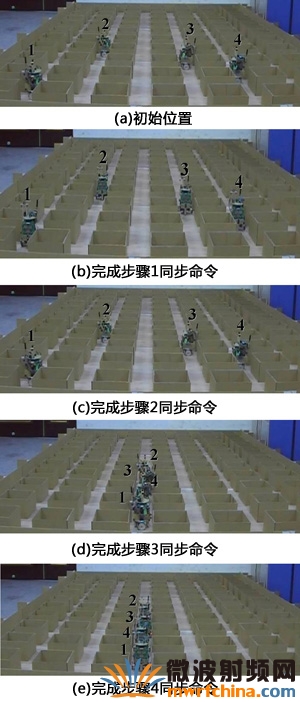
圖7 橫隊變縱隊路徑規劃
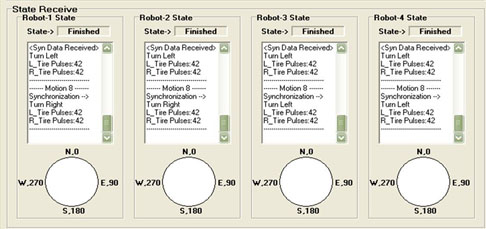
圖8 橫隊變縱隊狀態回傳
欲使四臺機器人由圖9(a)所示的初始位置,做對角線位置變換成圖9(h)的最終位置,可依表2的多個與同步命令整合數據,逐一由監控接口下達,則如圖9(a)~(h)所示,機器人群將逐步完成,對角線交叉變換隊形(其每個步驟都為多個或同步動作模式,因此,每個步驟皆是同時啟動并執行的),而完成此路徑規劃的狀態回傳,詳見圖10的各條列方塊。
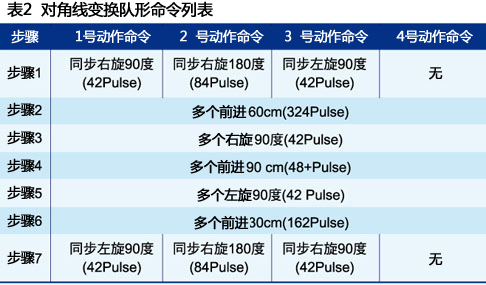
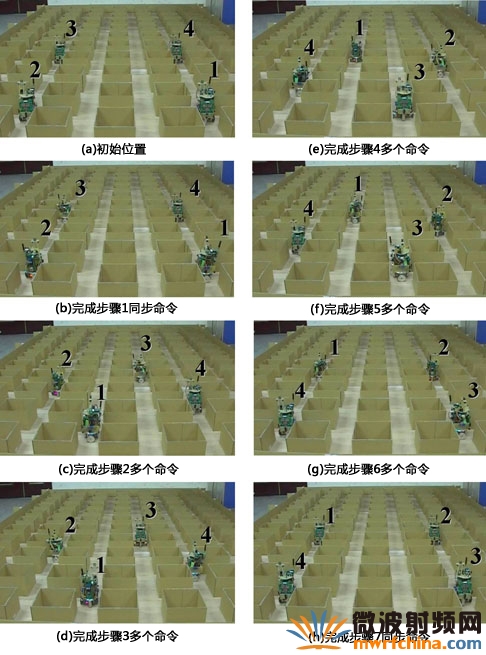
圖9 對角線變換隊形
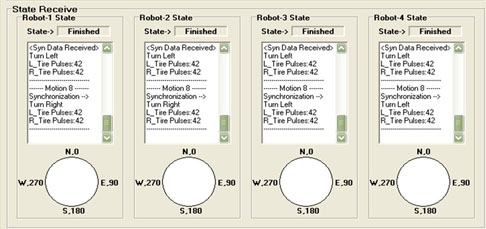
圖10 對角線變換隊形狀態回傳
驗證了使用群控機器人路徑規劃系統的多個與同步命令模式,逐次下達動作命令,可使機器人群做對角線變換位置的路徑規劃。
目前多機器人的路徑規劃可歸類為兩大方向,其一為由計算機端監控接口,完全監控機器人的運動行為,包含計算機端對機器人端的命令下達,以及機器人端執行完命令的狀態回傳,稱為多機器人路徑規劃系統。
經實際測試,且確定機器人本身的功能正常后,進一步整合監控接口做測試,發現已經可以順利對多機器人端下達單個、多個以及同步運動模式等控制,并且提出利用多個與同步運動模式,由監控接口對機器人群下達命令,執行隊形變換的路徑規劃方式,如:橫隊變縱隊,借以驗證此系統的穩定性,并且可作為后續多機器人路徑規劃延伸實驗的基礎系統。
作者:蕭勝文、張志鴻、李柏毅、蘇國嵐,盛群半導體
 粵公網安備 44030902003195號
粵公網安備 44030902003195號