厚勢按:在17 年12 月底CCTV 2 財(cái)經(jīng)頻道播出的中央電視臺舉辦的 「2017 CCTV 中國創(chuàng)業(yè)榜樣」頒獎(jiǎng)典禮上,來自蘇州豪米波技術(shù)有限公司的總經(jīng)理畢欣博士獲得殊榮!
蘇州豪米波的執(zhí)行董事是同濟(jì)大學(xué)汽車學(xué)院教授白杰博士,白杰教授曾在去年8 月5 日舉辦的「2017 上海智能網(wǎng)聯(lián)新能源汽車高峰論壇」(由上海交通大學(xué)智能網(wǎng)聯(lián)汽車創(chuàng)新中心主辦,上海厚勢網(wǎng)絡(luò)科技有限公司承辦,上海交通大學(xué)上海高級金融學(xué)院金融MBA 項(xiàng)目和交大安泰MBA 汽車協(xié)會協(xié)辦)上做過非常精彩的報(bào)告。
本文將先回顧中國江蘇網(wǎng)對畢欣博士的采訪報(bào)道,然后回顧白杰教授的精彩報(bào)告。
近日,「2017 CCTV 中國創(chuàng)業(yè)榜樣」頒獎(jiǎng)典禮圓滿舉行,由商界領(lǐng)袖、知名投資家、媒體總編輯等組成的專家評審團(tuán)共同評選出十位「2017 CCTV 中國創(chuàng)業(yè)榜樣」。江蘇共有2 名創(chuàng)業(yè)者榮獲殊榮,他們?nèi)渴恰竸?chuàng)業(yè)江蘇」科技創(chuàng)業(yè)大賽獲獎(jiǎng)選手。讓我們一起來領(lǐng)略他們的獲獎(jiǎng)風(fēng)采。

蘇州豪米波雷達(dá)公司總經(jīng)理 畢欣 博士
在「2017 CCTV 中國創(chuàng)業(yè)榜樣」頒獎(jiǎng)典禮上,來自江蘇蘇州的的畢欣走上了頒獎(jiǎng)臺。他帶來的項(xiàng)目是汽車智能駕駛輔助系統(tǒng)與毫米波雷達(dá),為駕駛?cè)藛T行車過程中的安全保駕護(hù)航。在車輛激增、道路擁堵的現(xiàn)狀下,安全駕駛變得刻不容緩。
據(jù)該公司總經(jīng)理畢欣介紹,車載毫米波雷達(dá)的全天候工作特性,在汽車安全方面能發(fā)揮很大的作用,通過發(fā)射電磁波,探測到目標(biāo)產(chǎn)生回波,利用先進(jìn)的波形設(shè)計(jì)與信號處理技術(shù),可以輸出復(fù)雜交通環(huán)境下多目標(biāo)的角度、速度、距離,甚至目標(biāo)的屬性。目前高端車已經(jīng)開始大量運(yùn)用了,未來在高級輔助駕駛與自動(dòng)駕駛領(lǐng)域必將成為不可或缺的重要感知技術(shù)。
放棄中科院工作,果斷投身創(chuàng)業(yè)大潮
在采訪中得知,畢欣從事毫米波的研究已有多年。早在攻讀博士期間其課題研究方向就為交通安全領(lǐng)域雷達(dá)關(guān)鍵問題研究,進(jìn)行車載雷達(dá)系統(tǒng)和算法的研究。美國留學(xué)訪問期間,在MIT 的EECS 實(shí)驗(yàn)室對MIMO 體制雷達(dá)系統(tǒng)地進(jìn)行了更為深入的研究。課題組從最初的2 名碩士生,逐步發(fā)展成近20 人的協(xié)作團(tuán)隊(duì),實(shí)現(xiàn)了24 GHz 交通雷達(dá)、安防雷達(dá)、工業(yè)測控雷達(dá)等產(chǎn)品的量產(chǎn)化生產(chǎn)和銷售,年銷售達(dá)千萬元以上,逐步確立了在研究所的微波毫米波雷達(dá)探測與成像技術(shù)、智能汽車與無人機(jī)環(huán)境感知系統(tǒng)的研究方向,并于2014 年底破格晉升為中科院沈陽自動(dòng)化所研究員。
據(jù)悉,畢欣在中科院作為課題組長期間,一直在探索和深入毫米波雷達(dá)在汽車主動(dòng)安全與自動(dòng)駕駛領(lǐng)域的應(yīng)用,承擔(dān)了多國家和省市課題,同時(shí)代表我國交通部公路研究院作為標(biāo)準(zhǔn)化專家多次參與了ISO/TC204 自動(dòng)駕駛相關(guān)標(biāo)準(zhǔn)的討論。
2016 年,在行業(yè)標(biāo)準(zhǔn)化工作會議、行業(yè)論壇,以及國家重點(diǎn)專項(xiàng)申報(bào)交流中,結(jié)識同濟(jì)大學(xué)白杰教授,通過多次深入交流,大家達(dá)成共識,希望利用各自在國內(nèi)、外毫米波雷達(dá)與先進(jìn)駕駛輔助系統(tǒng)(ADAS)領(lǐng)域多年的行業(yè)與技術(shù)積累,共同推動(dòng)智能汽車環(huán)境感知與控制系統(tǒng)國產(chǎn)化,使目標(biāo)產(chǎn)品在基礎(chǔ)研究、產(chǎn)業(yè)化及應(yīng)用上盡快達(dá)到國際領(lǐng)先水平,打造國際研發(fā)「汽車主動(dòng)安全與自動(dòng)駕駛技術(shù)」的自主品牌。
為著共同的理想,畢欣辭去中國科學(xué)院沈陽自動(dòng)化所研究員的職務(wù),投身創(chuàng)業(yè),一起創(chuàng)辦了蘇州豪米波技術(shù)有限公司。
深耕技術(shù),產(chǎn)品運(yùn)用前景廣闊
據(jù)介紹,該公司的產(chǎn)品主要依托自主核心毫米波雷達(dá)傳感技術(shù),實(shí)現(xiàn)對智能駕駛與無人駕駛中,周圍環(huán)境的實(shí)時(shí)感知,通過預(yù)警和干涉等主動(dòng)安全策略,實(shí)現(xiàn)汽車的自適應(yīng)巡航(ACC)、碰撞預(yù)警(FCW)、緊急自動(dòng)剎車(AEB),以及行車盲區(qū)檢測(BSD)等駕駛輔助系統(tǒng)的主動(dòng)安全功能,可以有效減少事故發(fā)生率,市場需求迫切。毫米波雷達(dá)傳感器亦可廣泛應(yīng)用于非汽車行業(yè)(如低空飛行無人機(jī))的100 米左右范圍內(nèi)測距和測速,智能交通、安防監(jiān)控等領(lǐng)域,是一種新興的,具有廣闊運(yùn)用前景的產(chǎn)業(yè)。先進(jìn)的設(shè)計(jì)理念,自動(dòng)化的生產(chǎn)工藝,軍工級的測試工藝,汽車級的質(zhì)量控制,保證了產(chǎn)品的領(lǐng)先性、可靠性和一致性。
在采訪過程中,畢欣告訴記者:「目前國內(nèi)乘用車ADAS整體搭載率不足10%,并且大部分的ADAS 功能只有在中高端車型的高配車上搭載,如長安汽車的CS75,吉利博瑞等,只有頂配的車型才搭載了ACC 或AEB,其余車型均未搭載。可以看出國內(nèi)乘用車輔助系統(tǒng)實(shí)際搭載率其實(shí)是很低的,未來存在巨大的市場空間。」在中國新車評價(jià)規(guī)程等法規(guī)的推動(dòng)下,以及在車企競爭日漸激烈的情況下,為了提高產(chǎn)品競爭力,我們有理由相信,未來國內(nèi)駕駛輔助系統(tǒng)必將大范圍的普及,并下探到低級別的車型。對于駕駛輔助系統(tǒng)未來的市場前景,畢欣滿懷信心。
目前,公司與清華大學(xué)、同濟(jì)大學(xué)等國內(nèi)高校建立了長期研發(fā)戰(zhàn)略合作關(guān)系,不斷加深基礎(chǔ)理論研究與突破。在合作過程中有計(jì)劃地進(jìn)行高端研發(fā)人才培養(yǎng),為企業(yè)的可持續(xù)發(fā)展奠實(shí)人才基礎(chǔ)。「讓智能汽車環(huán)境感知技術(shù)成為中國汽車的基礎(chǔ)配置,促進(jìn)社會效益、經(jīng)濟(jì)效益最大化,是我們追求的終極目標(biāo)」,畢欣如是說道。
現(xiàn)場圖:同濟(jì)大學(xué)汽車學(xué)院教授 白杰 博士
我來自同濟(jì)大學(xué)汽車學(xué)院,今天會跟各位同仁匯報(bào)的主題是《毫米波雷達(dá)和智能駕駛》。大致匯報(bào)的內(nèi)容有以下5 點(diǎn),總體來說內(nèi)容上可能會稍微偏專業(yè)一點(diǎn),但我盡可能講的通俗一點(diǎn)。

智能駕駛的背景與進(jìn)程
現(xiàn)在對自動(dòng)駕駛、智能駕駛、智能網(wǎng)聯(lián),有很多各種各樣的定義。在這些定義里面,ADAS 系統(tǒng)是我們通常說的智能駕駛員輔助系統(tǒng),「ADAS 系統(tǒng)」一般來說在Level 0 到Level 1,具備單一的控制功能。當(dāng)復(fù)數(shù)的ADAS 系統(tǒng)搭載在一輛車?yán)锩嬷螅覀儼阉x為「準(zhǔn)自動(dòng)駕駛」,或者說已經(jīng)接近自動(dòng)駕駛。如圖1 所示,準(zhǔn)自動(dòng)駕駛里面,包括「駕駛員負(fù)全責(zé)」以及「駕駛員與系統(tǒng)」的切換,這個(gè)部分都屬于準(zhǔn)自動(dòng)駕駛的領(lǐng)域。
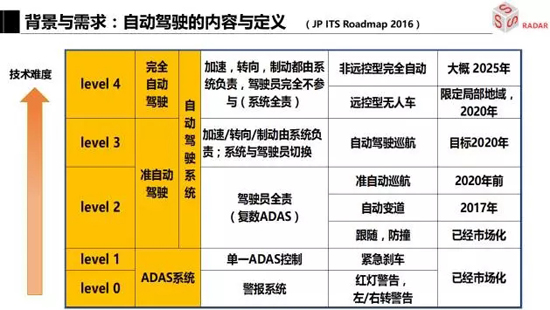
圖1、自動(dòng)駕駛的內(nèi)容與定義
「完全自動(dòng)駕駛」就是說汽車由整個(gè)自動(dòng)駕駛系統(tǒng)負(fù)責(zé)任,包括加速、轉(zhuǎn)向、制動(dòng)都由汽車來操縱。這是自動(dòng)駕駛大致的內(nèi)容和定義。圖1 中沒有提完全無人駕駛,就是說整個(gè)車完全無人的話,應(yīng)該在這上面還有一層,估計(jì)到那個(gè)時(shí)候,汽車工業(yè)可能是另外一種形態(tài),就是說汽車工業(yè)可能來到后汽車工業(yè)時(shí)代,所以沒有把這一部分表達(dá)出來。
大家可以看到,自動(dòng)駕駛進(jìn)入市場的時(shí)間上大致在2020 年或者2025 年,可能這是限于一些高檔車型以試驗(yàn)性質(zhì)來運(yùn)行的時(shí)間。就是說,實(shí)際到我們一般人買的車?yán)锩娉霈F(xiàn)自動(dòng)駕駛的話,估計(jì)還要更長的時(shí)間。
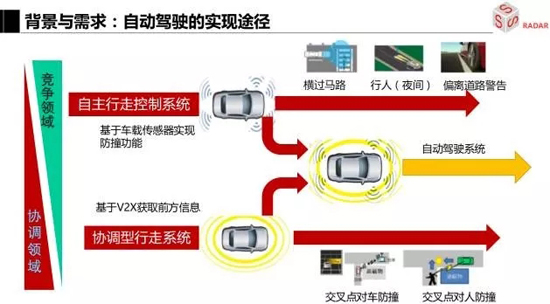
圖2、自動(dòng)駕駛的實(shí)現(xiàn)途徑
在自動(dòng)駕駛里面,我們實(shí)現(xiàn)自動(dòng)駕駛,主要是這么兩種途徑:一個(gè)是基于車載自身傳感器的「自主行走控制系統(tǒng)」;還有一個(gè)基于V2X 獲取前方信息的「協(xié)調(diào)型行走系統(tǒng)」,也就是所謂的汽車網(wǎng)聯(lián)。再往上一層就是智能加上網(wǎng)聯(lián),當(dāng)智能和網(wǎng)聯(lián)這兩個(gè)系統(tǒng)聯(lián)合在一起,可能就是將來的自動(dòng)駕駛系統(tǒng)。
2020年或者2025年,這個(gè)時(shí)間上都是相對來說比較含糊的。為什么?因?yàn)榫W(wǎng)聯(lián)這條路,用什么樣的方式,包括什么樣的標(biāo)準(zhǔn),到目前來說還具有很多模糊性,在技術(shù)上還沒有完全準(zhǔn)確的時(shí)間。所以,要將智能和網(wǎng)聯(lián)這兩條線合并到一條線的時(shí)間上,就不是那么準(zhǔn)確了。

圖3、自動(dòng)駕駛的商業(yè)路線
現(xiàn)在在自動(dòng)駕駛技術(shù)的商業(yè)化路線方面,我們前面有的初級自動(dòng)駕駛,也可以說是ADAS 系統(tǒng),在主機(jī)廠里面,現(xiàn)在主機(jī)廠里面一般采用SAE 1 級、2 級,然后往3 級、4 級方向發(fā)展。0 級在很早以前,90 年代就有了。
然后在中級里面,像現(xiàn)在的特斯拉直接從2 級開始。當(dāng)然特斯拉從SAE 2 級、3 級開始也有它的產(chǎn)業(yè)基礎(chǔ),在美國那邊汽車公司里面都已經(jīng)進(jìn)入了2 級,它再從0 級出發(fā)也是不符合時(shí)代的。所以它的表現(xiàn)也是屬于比較正常的,當(dāng)然特斯拉更多的是從2 級自動(dòng)化用了3 級的HMI (人機(jī)界面)系統(tǒng),這樣有一種跨界的感覺。
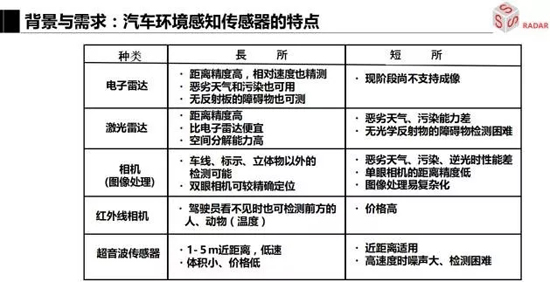
圖4、汽車環(huán)境感知傳感器的特點(diǎn)
自動(dòng)駕駛里面,智能的這部分更多是車載傳感器的集合、傳感器的融合以及應(yīng)用。在傳感器里面(如圖4 所示),車載傳感器主要是分五種:電子雷達(dá)、激光雷達(dá)、相機(jī)、紅外線相機(jī)、超聲波傳感器。其中,超聲波由于探測距離太近,雖然現(xiàn)在搭載率很高,但是將來可能會更多的被取代。
在激光雷達(dá)方面,現(xiàn)在多線的激光雷達(dá)價(jià)格還相對比較高,而且這個(gè)價(jià)格什么時(shí)候降下來并不一定,我們很多人都想激光雷達(dá)在未來幾年內(nèi)價(jià)格能降下來,但是這個(gè)可能很難做到。當(dāng)年毫米波雷達(dá)也是從90 年代開始一直降價(jià)降到現(xiàn)在,終于從數(shù)萬美金降到―百美金。所以說,這個(gè)時(shí)間的發(fā)展往往不一定如我們所期待的那么順利。
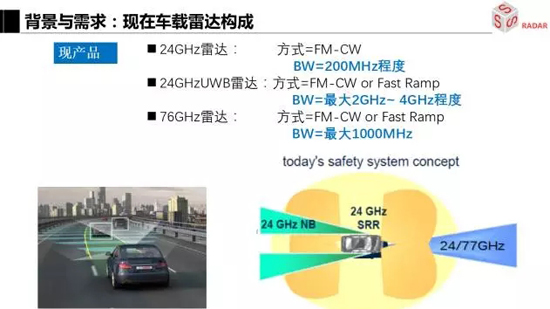
圖5、現(xiàn)代車載雷達(dá)構(gòu)成
在汽車電子雷達(dá)方面,現(xiàn)在汽車搭載的主要是往前看的前視雷達(dá),有24G 和77G 兩種遠(yuǎn)距離雷達(dá)。這個(gè)24G 的里面,也有往后視的24G 的雷達(dá)。24G 和77G 的雷達(dá)的區(qū)別點(diǎn)在于,24G 分窄帶和寬帶兩種雷達(dá),77G 主要是窄帶雷達(dá),它的帶寬比較窄。
77G、76G,雖然法規(guī)上允許最大1 個(gè)GHz,但是77G 雷達(dá)的帶寬大概在500 MHz 以內(nèi),帶寬不夠高的話,會帶來距離分解能力不高的問題。24G 的寬帶雷達(dá)當(dāng)時(shí)在法規(guī)上最大可以到2 個(gè)GHz,也有說當(dāng)時(shí)26G 可以用4 個(gè)GHz。這里帶寬的提高使得分解能力提高很多。但是由于只有2G 帶寬的信息分辨能力、運(yùn)算速度的限制和EU區(qū)域限制,帶寬帶來的效果并沒有表現(xiàn)出來。
智能駕駛毫米波雷達(dá)
稍微介紹一下汽車?yán)走_(dá)的歷史,其實(shí)最早從70 年代、80 年代,大家就一直在做汽車車載毫米波雷達(dá)。汽車的智能化也不是最近才提起的話題,實(shí)際上在70 年代的時(shí)候大家就想做汽車的智能化。
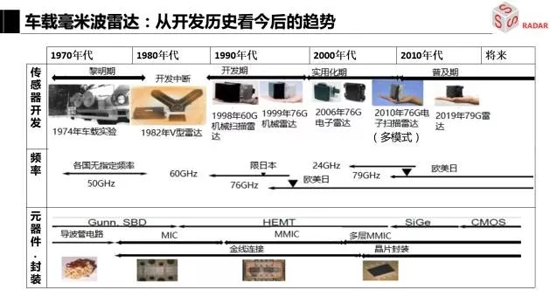
圖6、車載毫米波雷達(dá)的發(fā)展史
在圖6 中可以看到,70 年代的時(shí)候汽車上面背著幾個(gè)大臉盆似的天線,這個(gè)時(shí)候就開始想著做汽車智能化。1990 年開始,進(jìn)入90 年代微電子技術(shù)的發(fā)展,一下子使得雷達(dá)小型成為可能,也是在這個(gè)時(shí)候雷達(dá)開始開發(fā)得快一點(diǎn)。
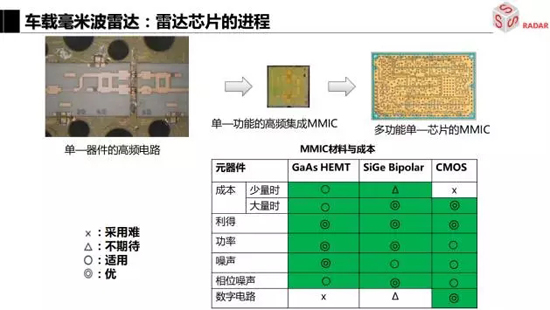
圖7、雷達(dá)芯片的進(jìn)程
車載雷達(dá)里面有一個(gè)芯片材料,這個(gè)芯片從90 年代開始,最早是用GaAs 這種材料,現(xiàn)在是SiGe,在將來五到十年可能CMOS 芯片會出來。用CMOS 做的高頻信號發(fā)生器,當(dāng)材料變得越來越便宜的同時(shí),它的功率、噪聲、功放這方面的表現(xiàn)會越來越難控制,它對生產(chǎn)工藝的相對要求就會越來越高。
現(xiàn)在國外也在往CMOS 這個(gè)方向轉(zhuǎn),但是剛剛起步階段,相對來說制造工藝技術(shù)方面要求更高。我們要注意一點(diǎn),當(dāng)一種新的材料、新的技術(shù)導(dǎo)入的時(shí)候,在起步的前幾年,它的價(jià)格肯定會比它的上一代暫時(shí)貴,例如CMOS 芯片比SiGe 芯片貴,但這是起步階段必然的問題。
79GHz 雷達(dá)技術(shù)
我們的下一代雷達(dá)會是什么?
我們反轉(zhuǎn)來看過去歷史的發(fā)展就會看到,現(xiàn)在我們使用的技術(shù),其實(shí)就是十年前各個(gè)研究所、大學(xué)在開發(fā)的技術(shù)。也就是說,在將來下一個(gè)五年、十年,我們會用的技術(shù)基本上目標(biāo)是定在79G 毫米波雷達(dá)。國外5 到10 年前就已經(jīng)開始做79G。
為什么會用79G?
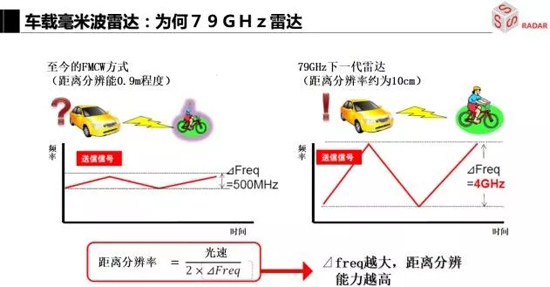
圖8、為何會是79GHz 雷達(dá)?
如圖8 所示,我們現(xiàn)階段用的77G 的毫米波雷達(dá),根據(jù)雷達(dá)的公式,帶寬較窄的情況下,它的距離分辨率大概也就是1 米的范圍。
當(dāng)帶寬提高的話,我們可以看到在79G 用了4 個(gè)GHz,它的距離分辨率可以提高到很多。當(dāng)距離分辨率提高到了10 個(gè)厘米,兩個(gè)物體前后左右相隔的距離差達(dá)到10 個(gè)厘米也能測量出來的話,就不需要角度的分解了,也就是說不需要相控陣天線就可以把兩個(gè)物體分開。這能夠極大地提高道路上各種障礙物的分離檢測能力,而不需要帶上一個(gè)強(qiáng)大的相控陣天線。
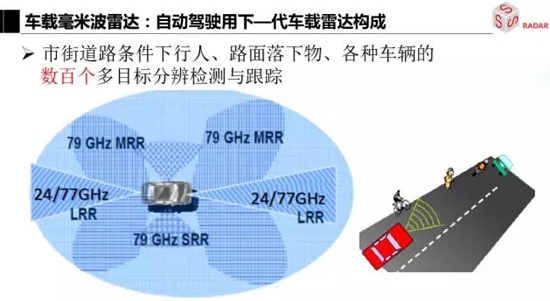
圖9、自動(dòng)駕駛用下一代車載雷達(dá)構(gòu)成
在今后,由于79G 雷達(dá)的出現(xiàn),將來的智能駕駛的汽車就會前向還是24G、77G 的遠(yuǎn)距離雷達(dá),但在中間側(cè)向有4 個(gè) 79G 的毫米波雷達(dá),來實(shí)現(xiàn)環(huán)視。
79G 的毫米波雷達(dá)具有高分解能力,使得在某些功能可以逐漸代替一些現(xiàn)有的光學(xué)傳感器的性能。也就是說79G 除了水平方向的高分解能力之外,同時(shí)可以做一個(gè)上下方向的79G 毫米波雷達(dá),水平和上下同時(shí)進(jìn)行掃描,很容易實(shí)現(xiàn)毫米波的成像。
也就是說,很快(大概十年內(nèi))將會有一種很強(qiáng)大的毫米波成像雷達(dá),這在很大的程度上會替代現(xiàn)有的光學(xué)傳感器。
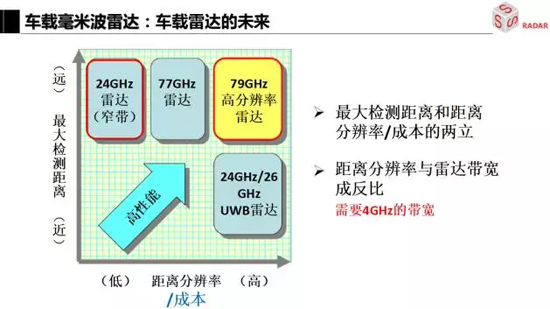
圖10、車載雷達(dá)的未來
圖10 是目前整個(gè)雷達(dá)在發(fā)展機(jī)制上區(qū)分出的幾種雷達(dá),這里列出來了24G、77G、79G 三種。這幾種雷達(dá)里面,主要考慮兩種走向:
· 距離分辨率跟成本,也就是說在性價(jià)比這個(gè)方面;
· 最大檢測距離。
從圖10 的坐標(biāo)中可以知道,將來的趨勢有可能是從性能更好的方向上來說,會往79G 走。還有一個(gè)性價(jià)比,價(jià)格最便宜的方向是24G,這在中國可能在一段時(shí)期里面都會存在。這跟歐美市場可能會有不一樣的走向。因?yàn)闅W美市場的話已經(jīng)使用77G 了,而國內(nèi)的話,可能采取性能高的往79G 走、價(jià)格便宜的往24G 走的路線。
79G 的毫米波雷達(dá)會有什么好處呢?
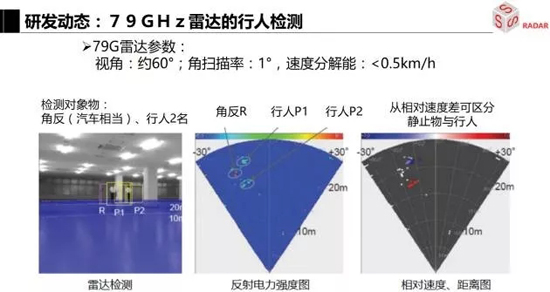
圖11、研發(fā)動(dòng)態(tài):79 GHz 雷達(dá)的行人檢測
79G 的毫米波雷達(dá)由于它可以做到4 個(gè)G 的帶寬,在這4 個(gè)G 的帶寬里面可以實(shí)現(xiàn)成像。比如說像這個(gè)室內(nèi),兩個(gè)人和反射板(用于表示汽車),把它們放在一起,79G 能夠很精準(zhǔn)的將其分解出來,當(dāng)然圖11 這是通過機(jī)械式掃描來看這個(gè)79G 的性能會怎樣。在以前的雷達(dá)里面是看不到這些東西,與現(xiàn)在在醫(yī)院里做CT 成像是基本一樣的。
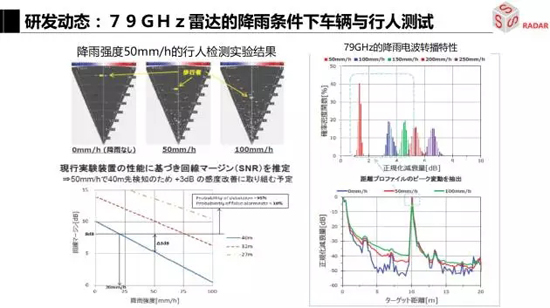
圖12、研發(fā)動(dòng)態(tài):79 GHz 雷達(dá)降雨條件下車輛與行人測試
當(dāng)然79G 也是電磁波雷達(dá),由于頻率越來越高,我們要考慮到電波在降雨或者是冰雪條件之下,傳感器的性能也必然會衰減。
比如說行人行為檢測,沒降雨的時(shí)候,這一款雷達(dá)可以看到50 米的話,下中雨的時(shí)候,同款雷達(dá)看人的距離會縮短到40 米。也就是說,會有10 米的衰減出現(xiàn)。因此,如果79G 雷達(dá)要看得更遠(yuǎn)的話,在信噪比方面的性能還需要做進(jìn)一步的增強(qiáng),還要做很多的努力。
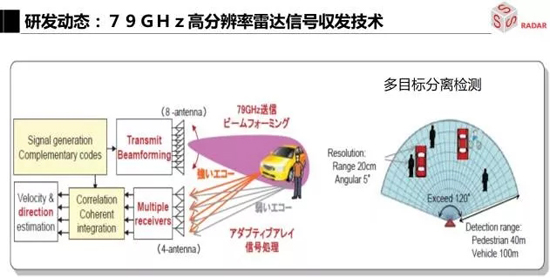
圖13、研發(fā)動(dòng)態(tài):79 GHz 高分辨率雷達(dá)信號雙收技術(shù)
剛才講的79G,在沒有相控陣的時(shí)候,它的分解能力就很高。而如果同時(shí)對79G 雷達(dá)也做與現(xiàn)在77G 一樣的相控陣天線,多發(fā)射多接收的話,這時(shí)候?qū)Χ嗄繕?biāo)的分離檢測能力除了距離上的分解還會有角度上的分解,對多目標(biāo)的分離檢測能力將會有大幅度的提高。
當(dāng)然這個(gè)大幅度的提高的同時(shí),也會帶來一個(gè)很大的問題,就是多目標(biāo)的分離檢測。現(xiàn)在77G 雷達(dá)用的是32 或64 個(gè)目標(biāo),在79G 的時(shí)候雷達(dá)內(nèi)部信號處理就不是同時(shí)跟蹤764 個(gè)目標(biāo),而是128 個(gè)或者更多的目標(biāo)數(shù)。我們同時(shí)跟蹤的目標(biāo)數(shù)越多,對雷達(dá)內(nèi)部的信號處理芯片運(yùn)算能力要求會成指數(shù)增長。這是79G 雷達(dá)開發(fā)需要考慮的問題。

圖14、研發(fā)動(dòng)態(tài):雷達(dá)信號處理系統(tǒng)硬件概要
雷達(dá)信號處理可以集成在一個(gè)DSP 芯片里面。這在一個(gè)芯片里面做信號處理的話,除了剛才多目標(biāo)數(shù)量的影響之外,還有下雨天氣,道路環(huán)境噪聲的影響,在這里面除了對多目標(biāo)的分離檢測信號做分離處理,還要做進(jìn)一步的跟蹤處理。
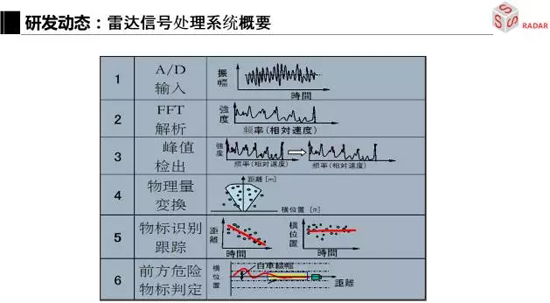
圖15、研發(fā)動(dòng)態(tài):雷達(dá)信號處理系統(tǒng)概要
還有如自動(dòng)駕駛里的車輛慣導(dǎo),通過慣導(dǎo)來推算前方障礙物對你來說具有多大的危險(xiǎn)性。這個(gè)危險(xiǎn)性的判斷,是雷達(dá)信號處理的一部分。也就是說在雷達(dá)信號處理里面,會在雷達(dá)的內(nèi)部做圖15 中所提到的六項(xiàng)信號處理。
隨著現(xiàn)在雷達(dá)波形越來越復(fù)雜,從第二個(gè)階段開始信號處理都已經(jīng)是運(yùn)算負(fù)荷很重的信號處理,包括我們現(xiàn)在用的最新的雷達(dá),這也是79G 雷達(dá)需要克服的技術(shù)難題。
蘇州豪米波雷達(dá)技術(shù)動(dòng)態(tài)
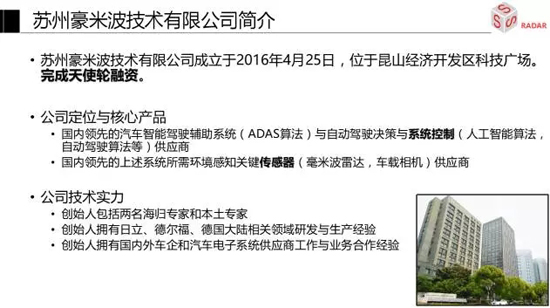
圖16、蘇州毫米波雷達(dá)技術(shù)有限公司簡介
下面我簡單介紹一下蘇州毫米波這個(gè)公司。蘇州毫米波技術(shù)有限公司成立的時(shí)間不長。這個(gè)公司的核心產(chǎn)品主要在于兩個(gè)地方,一個(gè)是智能駕駛系統(tǒng)的控制算法,同時(shí)也做關(guān)鍵的傳感器硬件以及傳感器的算法。從系統(tǒng)到傳感器的合成方面,我們具有強(qiáng)大的開發(fā)能力。
公司成立一年,現(xiàn)在我們已經(jīng)把24G 的中距離80 米的雷達(dá)和遠(yuǎn)距離150 米雷達(dá)這兩款產(chǎn)品,從性能上和產(chǎn)品上都已經(jīng)調(diào)試完畢。
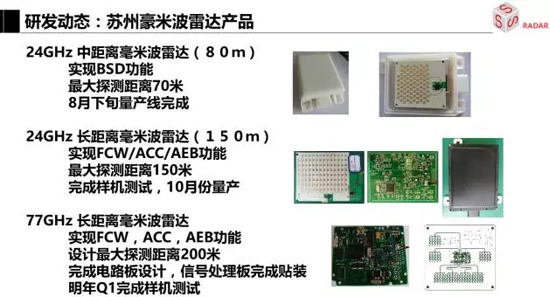
圖17、蘇州毫米波雷達(dá)產(chǎn)品
盡管我們輕車熟路,盡管我們以前在國外一直做毫米波雷達(dá),但是真正做到產(chǎn)品化,我們在去年一年的時(shí)間里,還是做了四五輪的試制。通過每一次的試制、仿真,來改善性能,使得中距離雷達(dá)能夠達(dá)到80 米的檢測距離,遠(yuǎn)距離雷達(dá)能夠達(dá)到150 米。
去年國內(nèi)很多人跟我講,24G 做不出遠(yuǎn)距離,但是我們24G 也在這么一個(gè)小小的天線里面把150 米給做出來了。同時(shí),我們看到這個(gè)天線和信號處理分成兩塊板,我們現(xiàn)在已經(jīng)把這兩塊板整合到一塊板了。同時(shí)我們也還在做77G 雷達(dá)的開發(fā),盡管這個(gè)77G 不一定把它產(chǎn)品化,但是77G 也已經(jīng)很順利的把樣品做出來了。
剛才講遠(yuǎn)距離雷達(dá)主要是放在汽車前面的,用來做自適應(yīng)巡航或者緊急防碰撞緊急制動(dòng)系統(tǒng),包括乘用車和商用車的緊急防碰撞。中距離雷達(dá)主要用來做汽車的后向檢測,這為什么會需要80 米?因?yàn)楫?dāng)你的雷達(dá)搭載在汽車的兩個(gè)后角的時(shí)候,后擋板對雷達(dá)的減衰非常大。當(dāng)雷達(dá)檢測距離是30 米或者50 米的時(shí)候,實(shí)際安裝汽車看的距離可能只有幾米。盡管我們做了最大探測距離80米,但是實(shí)際上安裝在汽車上,我們的雷達(dá)只能感覺到車后方40 米左右的障礙物,擋板會減衰掉一半。這也是我們跟國內(nèi)其他公司不太一樣的,一直下決心把這個(gè)最遠(yuǎn)的距離提高的原因。
我們同時(shí)有四臺樣車,我在各個(gè)公司里面進(jìn)行測試和評價(jià)討論。當(dāng)然我們也積極的參與國家相關(guān)的標(biāo)準(zhǔn)和法規(guī)的制定工作,這確實(shí)對于一個(gè)產(chǎn)業(yè)發(fā)展也是一個(gè)很重要的方向。在法規(guī)方面,也還是需要積極參與。
同時(shí),我們團(tuán)隊(duì)也在做汽車的自動(dòng)駕駛,從整個(gè)汽車的自動(dòng)駕駛方面進(jìn)行開發(fā)。因?yàn)槲覀兪冀K感覺,雖然我們賣的產(chǎn)品是傳感器,但實(shí)際上在做傳感器的同時(shí),我們要把整車的自動(dòng)駕駛整個(gè)系統(tǒng)的控制都要做。
只有把自動(dòng)駕駛系統(tǒng)這個(gè)大方向在前面作為引領(lǐng)的話,才能夠知道將來的傳感器會需要什么樣。也是因?yàn)槲覀冊谝贿呑觯袁F(xiàn)在79G 我們已經(jīng)有了樣品,而且在樣機(jī)性能上也感覺還是很不錯(cuò)。當(dāng)然,79G 的研發(fā)現(xiàn)在對我們自己來說也還是屬于在絕密的階段,我們現(xiàn)階段79G 就不在外面展示。
結(jié)論
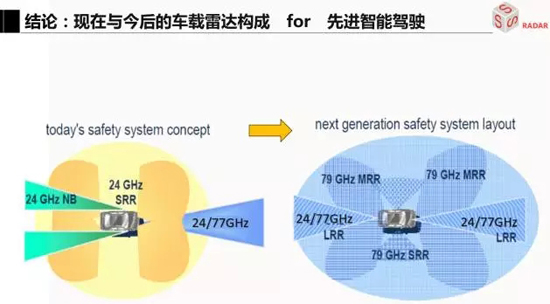
圖18、現(xiàn)在與今后的車載雷達(dá)構(gòu)成對比
如圖18 所示,今后我們感覺車載雷達(dá),它肯定會從這么幾個(gè)方向來發(fā)展。
下一代的感知系統(tǒng)里面,感知系統(tǒng)會往哪個(gè)方向走,取決于毫米波雷達(dá)成像技術(shù)走得有多快。只有毫米波雷達(dá)往成像方向走了以后,整個(gè)感知系統(tǒng),對于將來的自動(dòng)駕駛會起到很多引領(lǐng)作用。
當(dāng)然毫米波雷達(dá)成像,在軍用上早就已經(jīng)有,只不過是成本方面的問題。現(xiàn)在79G 已經(jīng)實(shí)現(xiàn)了距離方面的掃描,即現(xiàn)在是水平方面,只要加一個(gè)垂直方向的維度,也就是最多是以兩個(gè)79G 的成本來做,就可實(shí)現(xiàn)毫米波的成像。現(xiàn)在79G 也就在一兩百美金的范圍,乘以二也就是四五百美金,毫米波雷達(dá)的成像在今后五年里面會成功出來。
我們現(xiàn)在做的是從研究到設(shè)計(jì)到制造到銷售,這整個(gè)一條龍,我們都在做。應(yīng)該說是朝著這個(gè)美好的人生前進(jìn),還是很不錯(cuò)!
在這里我也非常歡迎上海交大的學(xué)生加入到我們的團(tuán)隊(duì)!
 粵公網(wǎng)安備 44030902003195號
粵公網(wǎng)安備 44030902003195號